
 EN
EN
 AR
AR BG
BG HR
HR CS
CS FR
FR DE
DE EL
EL HI
HI IT
IT JA
JA KO
KO RO
RO RU
RU ES
ES TL
TL ID
ID LT
LT SK
SK SL
SL UK
UK VI
VI ET
ET TH
TH TR
TR FA
FA AF
AF MS
MS HY
HY AZ
AZ KA
KA BN
BN LO
LO LA
LA MN
MN NE
NE MY
MY KK
KK UZ
UZ KY
KY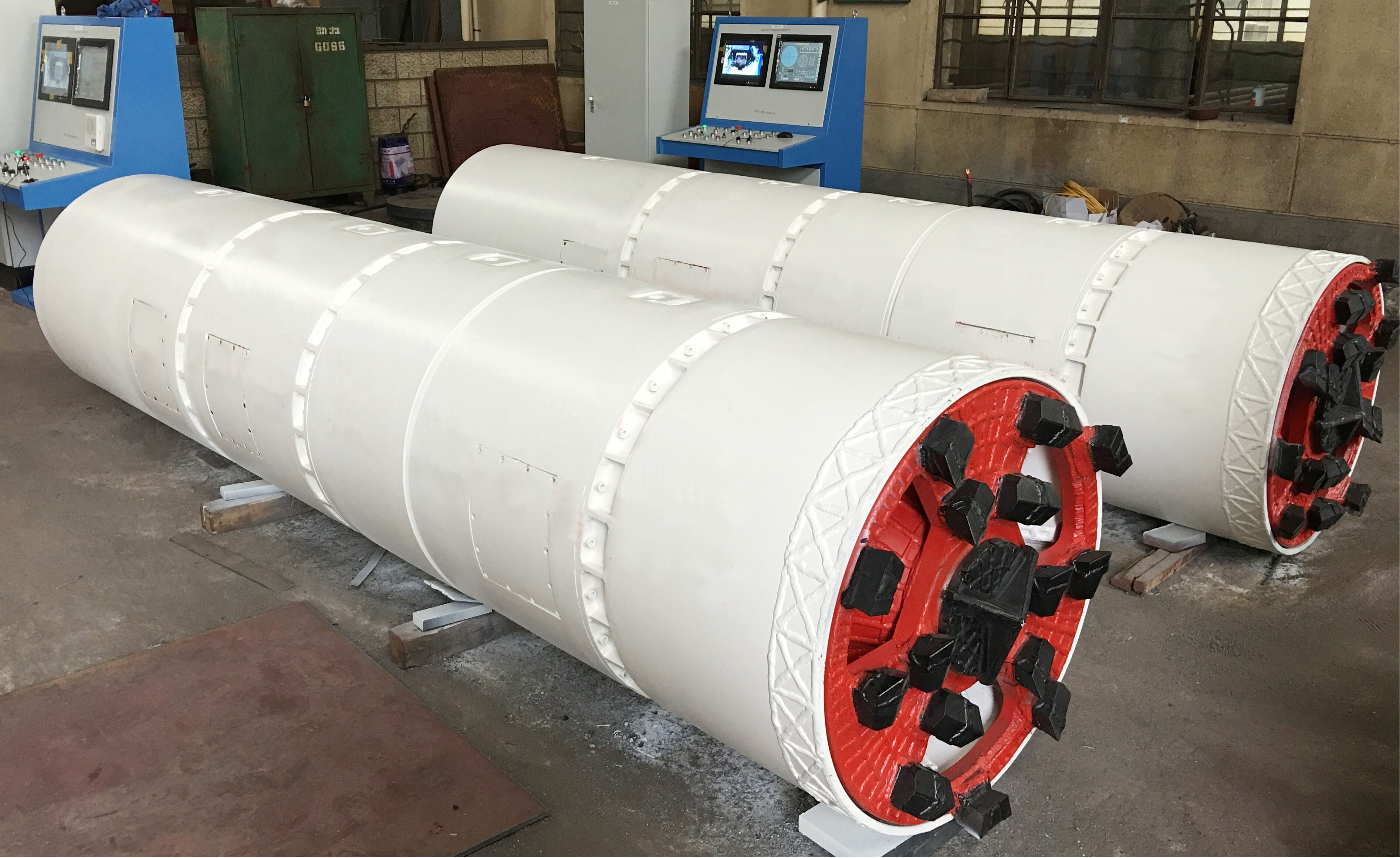
Wanneer ondergrondse nutsverskaffer teen noue stedelike korridore, rivieroorgange of infrastruktuurdigte areas staar, kom een kritieke vraag onvermydelik na vore: kan 'n mikrotonnel masjien ‘n boog met 'n radius van 50 meter volg? Dit is nie 'n abstrakte ingenieursvraag nie. Dit bepaal direk of 'n gleuflose installasieprojek uitvoerbaar is, hoeveel voorafse beplanning vereis word, en watter toestelspesifikasies voor mobilisasie geprioriteer moet word.

Die kort antwoord is ja — onder die regte toestande kan ’n mikrotunnelmasjien suksesvol ’n boog met ’n radius van 50 meter voltooi. Hierdie vermoë is egter nie universeel vir alle tipe toerusting, pypdeursnitte of grondprofiel nie. Dit is noodsaaklik dat projekbesitters, ontwerpingenieurs en konstruksietoepe die ingenieurslogika, bedryfsbeperkings en besluitnemingkriteria wat agter gekurwe mikrotunnelaandrywings lê, verstaan om betroubare resultate onder sensitiewe stedelike omgewings te verseker.
Verstaan van gekurwe aandrywingvermoë in mikrotunneling
Wat definieer ’n kurwe in mikrotunnelingmeetkunde
In tonnellose ingenieurswese word 'n kurwe gedefinieer deur sy radius — hoe kleiner die radius, hoe meer uitdagend is die navigasie-uitdaging vir enige mikrotonnelmasjien. 'n Radius van 50 meter word deur die industrie as 'n nou kurwe beskou. Om dit in perspektief te stel, word baie standaard mikrotonnelrybewegings ontwerp vir reguit lyning of sagte kurwes met 'n radius wat groter as 200 meter is. Om na 50 meter te daal, bring betekenisvolle meetkundige en meganiese kompleksiteit mee wat beide in die toestelontwerp en die ryplan ingebou moet word.
Die krommeradius bepaal direk hoeveel hoekafwyking die stuurstelsel by elke pypverbinding of masjien-artikulasiepunt moet bereik. Vir 'n mikrotunnelmasjien wat op 'n radius van 50 meter werk, word die hoekafwyking per pypsegment beduidend, veral wanneer die pypdeursnee toeneem. Ingenieurs moet toelaatbare verbinding-afbuigingshoeke bereken gebaseer op pyp-lengte, pypmateriaal en tipe koppeling om geometriese uitvoerbaarheid te bevestig voordat boorwerk begin.
Laserbegeleiding- en giroskopiese navigasiestelsels is die twee primêre instrumente wat gebruik word om akkuraatheid tydens gekurweerde drywings te handhaaf. 'n Konvensionele laserbegeleidingstelsel is beperk tot reglynige verwysing, wat dit ongeskik maak vir navigasie deur noue kurwes. Giroskopiese of outomatiese totaalstasie-stelsels is nodig om die werklike tydposisievoedingsinligting wat 'n mikrotunnelmasjienbestuurder benodig, te verskaf om 'n 50-meter-radius-uitlyning met presisie uit te voer en te handhaaf.
Artikulasiestelsels en Stuurmeganika
Die vermoë van 'n mikrotunnelmasjien om 'n gekurwe lyn te volg, hang fundamenteel af van sy scharnierstelsel. Die meeste moderne mikrotunnelmasjiene is toegerus met stuur-silinders wat assimetriese dryfkrag toepas om die snykop relatief tot die hoofliggaam te herlei. Tydens reguit drywings word hierdie silinders gebruik vir klein kurskorreksies. Tydens gekurwe drywings moet hulle egter voortdurend en presies werk om die ontwerpradius gedurende die hele drywinglengte te handhaaf.
Sommige mikrotunnelmasjiene het 'n dubbel-scharnierontwerp wat 'n addisionele swaai-punt bied en die hoekstuurreeks uitbrei. Hierdie konfigurasie is veral waardevol vir toepassings met klein radiusse, aangesien dit die meganiese spanning op die stuur-silinders verminder en die meetkundige vereistes oor twee scharniergewrigte eerder as een versprei. Vir 'n drywing met 'n radius van 50 meter oortref dubbel-scharniermasjiene dikwels enkel-scharnierontwerpe ten opsigte van beide akkuraatheid en meganiese betroubaarheid.
Die hidrouliese reaksiespoed en proporsionele beheervermoë van die stuurstelsel is ook belangrik. Op sagte grond of onder veranderlike grondtoestande kan die mikrotunnelmasjien onverwagse sykragte ervaar wat dit van sy lynafwyking afduw. 'n Stuurstelsel met vinnige hidrouliese reaksie en fyn proporsionele beheer laat bediener toe om klein, aanhoudende korreksies te maak sonder oorkorreksie, wat krities is vir die handhawing van 'n gladde gekurwe pad eerder as 'n reeks hoekafwykings wat die beoogde boog benader maar nie presies daarop ooreenstem nie.
Pypdeursnee, Pypmateriaal en Hul Effek op Kurwe-navigasie
Hoe Pypdeursnee die Minimum Kurwe-radius Beperk
Die buisdeursnee is een van die mees invloedryke veranderlikes wat bepaal of 'n mikrotunnelmasjien 'n kromming met 'n radius van 50 meter kan volg. Soos die buisdeursnee toeneem, neem die lengte van individuele buissegmente gewoonlik ook toe, en langer segmente veroorsaak groter hoekafwykings by elke verbinding om dieselfde gekurwe pad te volg. Dit beteken dat 'n radius van 50 meter makliker bereikbaar is met kleiner-deursnee buise — gewoonlik in die reeks van 300 mm tot 600 mm — as met groter-deursnee installasies bo 1000 mm.
Vir mikrotunnelmasjien-toepassings met groter deursnee moet aannemers dikwels die lengte van individuele buissegmente verkort om die hoekvereiste per verbinding te verminder. Die gebruik van korter stootbuise behou die meetkundige integriteit van die kromming terwyl dit oormatige spanningstrekking by die buisverbindinge voorkom. Hierdie wysiging moet tydens die inkopiesfase gespesifiseer word, aangesien standaardstootbuisvervaardigers slegs beperkte-lengte segmente vir gekurwe dryf-toepassings op versoek aanbied.
Die verhouding tussen pypdeursnee en krommeradius is nie bloot liniêr nie. Dit behels die pyp se traagheidsmoment, die kontakdruk tussen die buitekant van die pyp en die omringende grond, sowel as die kumulatiewe effek van die stootkragte terwyl die dryf voortsit. 'n Kwalifiseerde geotegniese en strukturele ingenieur moet bevestig dat die gekose pypdeursnee versoenbaar is met die 50-meter-radius voordat 'n mikrotunnelmasjien na die werf verskuif word.
Keuse van Pypmateriaal vir Drywe met Styf Kurwes
Nie alle pypmateriale presteer gelyk nie wanneer dit aan die buig- en hoekkragte onderwerp word wat tydens 'n gekurwe mikrotunnelaandrywing voorkom nie. Versterkte betonjackingpype, wat wydverspreid in standaard mikrotunnelmasjien-toepassings gebruik word, kan gekurwe aandrywings hanteer wanneer dit behoorlik gespesifiseer word met toepaslike voegontwerpe, insluitend kussingstukke en gemasineerde eindvlakke wat spanning gelykmatig oor die voegoppervlak versprei. Betonpype het egter 'n beperkte hoekafbuigingstoelaatbaarheid, wat respek moet word tydens die kurwe-ontwerp.
Staalpype, glasveselpype en polimeerbetonpype bied verskillende meganiese eienskappe wat voordelig kan wees vir toepassings met klein boogradiusse. Staalpype, byvoorbeeld, kan meer vervorming by die verbindings aanvaar en bied hoër weerstand teen plaaslike buigspanning. Hulle bring egter ander oorwegings mee, soos korrosiebeskerming, lasvereistes en hanteringlogistiek op die werf. Die keuse van pypmateriaal moet saam met die keuse van die mikrotunnelmasjienkonfigurasie gemaak word, waar beide as ‘n geïntegreerde ingenieursstelsel behandel word.
Die ontwerp van pypkoppelinge is ewe belangrik. Vir 'n mikrotunnelmasjien wat op 'n radius van 50 meter werk, moet koppelinge voldoende hoekbuigbaarheid bied terwyl dit steeds genoeg strukturele sterkte behou om die stootlas te oordra. Spesiaal ontwerpte sferiese of kegelvormige koppelingoppervlakke, gekombineer met saampersbare kussingpaddings, word dikwels gespesifiseer om die vereiste hoekbeweging toe te laat sonder dat spanningkonsentrasies ontstaan wat die pyp kan kraak of die waterdigte verbinding kan kompromitteer.
Grondtoestande en grondgedrag tydens gekurweerde dryfwerk
Invloed van grondtipe op stuurprestasie
Die grondprofiel waardeur 'n mikrotunnelmasjien voortbeweeg, het 'n direkte impak op sy vermoë om 'n nou kurwe te deurloop. In koherente grondsoorte soos klei bied die grond relatief stabiele sywaartse ondersteuning en voorspelbare gedrag, wat dit makliker maak om 'n konstante gekurwe lyn in stand te hou. Die mikrotunnelmasjien kan stuurkorreksies trapsgewys toepas sonder om skielike sywaartse verskuiwings te veroorsaak, wat noodsaaklik is om 'n gladde en akkurate dryf met 'n radius van 50 meter te bereik.
In korrelagtige grondsoorte soos sand of gruis is die situasie meer kompleks. Hierdie materiale bied minder laterale samehang, wat beteken dat die grond rondom die mikrotunnelmasjien kan skuif of migreer as gevolg van die stuurkragte wat toegepas word. Dit skep 'n risiko van onbeheerde oorstuur of uitlyningafwyking indien die operateur nie die vooruitgangspoed en stuurinvoere met presisie bestuur nie. In waterdraende korrelagtige grondsoorte word gesigdrukbestuur nog kritieker om grondverlies te voorkom, wat die uitlyning verder sou destabiliseer.
Gemengde-grondtoestande — waar die mikrotunnelmasjien afwisselende lae of sakke van verskillende grondtipes teëkom — verteenwoordig die mees uitdagende scenario vir die uitvoering van gekurweerde dryfwerk. Die verskillende weerstand oor die snykop kan onbedoelde yaw- of pitchkragte skep wat in konflik is met die beoogde stuurrigting. Projekte onder gemengde-grondtoestande behoort gedetailleerde voor-konstruksiegrondondersoeke in te sluit, en die gekose mikrotunnelmasjien behoort voldoende draaimomentvermoë en gesigdrukbeheer te hê om hierdie oorgange te bestuur sonder dat rigtingbeheer verloor word.
Smeer en ringvormige leë ruimte-bestuur op kurwes
Tydens 'n gekurwe mikrotunnelaandryf beweeg die pypstring nie in 'n perfek konsentriese pad binne die geboorde ringruimte nie. Die geometrie van die kurwe veroorsaak dat die pyp teen die grond aan die buiteboog druk, wat die wrywing aan daardie kant verhoog. Sonder behoorlike smeermiddelbestuur kan hierdie assimetriese wrywing stuurweerstand genereer wat die mikrotunnelmasjien se korreksievermoë oorweldig en die aandryf van die beoogde gekurwe uitlyning af trek.
Bentoniet-suspensie-injeksie deur smeerpoorte wat oral langs die inkappingstring versprei is, is die standaardmetode wat gebruik word om hierdie wrywing te verminder. Vir gekurwe aandrywe moet die smeerplan aangepas word om rekening te hou met die assimetriese verspreiding van wrywing. Injeksietempo's aan die buiteboogkant van die kurwe mag hoër wees as dié aan die binneboogkant om gebalanseerde smering te bereik en te voorkom dat die pypstring teen die grondgrens migreer.
Behoorlike smeermiddelgebruik verminder nie net die vereistes vir ophefkragsbehoefte nie, maar beskerm ook die pypverbindinge teen buitensporige sybelasting wat veroorsaak word deur assimetriese grondkontak. 'n Mikrotunnelmasjienprojekbestuurder moet gekurweerde-aandrywing smeermiddelprotokolle in die metodeverklaring insluit, waarin inspuitingsvolume-doelwitte, drukbeperkings en moniteringsintervalle gespesifiseer word wat die unieke vereistes van 'n 50-meter-radius-lynvoering weerspieël eerder as om te vertrou op 'n standaard reguit-aandrywing smeermiddelplan.
Beplanning- en uitvoeringsoorwegings vir 50-meter-radius-aandrywings
Voor-konstruksie ingenieursvereistes
Die uitvoering van 'n gekurweerde dryf met 'n mikrotunnelmasjien by 'n radius van 50 meter vereis 'n hoër vlak van voor-konstruksie-ingenieurswerk as 'n standaard reguit dryf. Die projekspan moet noukeurige uitlyningtekeninge opstel wat die kurwegeometrie in driedimensionele koördinate spesifiseer, sodat die rigtingsisteem met akkurate teikenposisies by gereelde intervals langs die dryfpaad geprogrammeer kan word. Hierdie tekeninge moet ook bevestig dat die gekose pypstelsel geometries die kurwe kan volg sonder om die gewrigdefleksiegrense te oorskry.
Berekening van die ophefkrags vir gekurwe aandrywings moet die addisionele wrywing en stuurweerstand wat deur die gekurwe uitlyning gegenereer word, insluit. Tussentydse ophefstasies — wat soms interophefstasies genoem word — kan vereis word om die totale ophefbelasting oor die pypstring te versprei en te voorkom dat die kumulatiewe krag die toelaatbare pypbelastingskapasiteit oorskry. Die aantal en plasing van interophefstasies moet ontwerp word gebaseer op die spesifieke kurwegeometrie, grondwrywingskoëffisiënte en pypmateriaaleienskappe wat vir die projek van toepassing is.
Die lanseer- en ontvangsputte moet geposisioneer en gebou word om die ingangs- en uitgangshoeke van die mikrotunnelmasjien te akkommodeer soos gedefinieer deur die gekromde lynvoering. Indien die kromme onmiddellik na lanseering begin, moet die putgeometrie toelaat dat die masjien die stuurkorreksie inisieer sonder om deur die putmuur of die ingangsverbinding beperk te word. Hierdie konstruksiedetails word dikwels in die vroeë projekbeplanning oor die hoof gesien, maar kan beduidende tydschema-versteurings veroorsaak indien dit nie vooraf aan die masjienmobilisering opgelos word nie.
Bedryfsmonitering en werklike tyd-korreksie
Tydens die uitvoering van ’n gekurweerde dryf is real-time monitering nie opsioneel nie — dit is ’n fundamentele bedryfsvereiste. Die mikrotunnelmasjienbestuurder moet voortdurend toegang hê tot posisie-data vanaf die rigtingsisteme, stootkraglesings vanaf die stootraam en interstootstasies, sowel as gesigdrukterugvoer vanaf die snykopinstrumente. Saam stel hierdie datastrominge die bestuurder in staat om vroeg afwykings in die uitlyning op te spoor en korrektiewe stuurinsette toe te pas voordat die afwyking buite aanvaarbare toleransies verskuif.
Vorderingstempo-bestuur is 'n kritieke bedryfsveranderlike in gekurweerde drywings. Te vinnige vordering verminder die tyd beskikbaar vir stuurkorreksies en verhoog die risiko dat gewrig-afbuigingslimiete by individuele pypverbindinge oorskry word. Te stadige vordering kan veroorsaak dat die ringvormige smeermiddel uitvloei of saamdruk, wat wrywing verhoog en stuur moeiliker maak. Ervare mikrotunnelmasjienoperateurs verstaan hierdie balans en pas hul vorderingstempo dinamies aan gebaseer op werklike terugvoer eerder as om 'n vasgestelde tempo te volg wat tydens voor-konstruksiebeplanning vasgestel is.
Nabestuur-geboude opnames is ewe belangrik om te bevestig dat die geïnstalleerde pypstelsel die ontwerpte 50-meter-radius-uitlyning binne die gespesifiseerde toleransies volg. Afwykings wat tydens die nabestuur-opname geïdentifiseer word, kan regstellende aksie soos grout of gewrigaanpassing vereis, en dit verskaf waardevolle lesse vir toekomstige gekurweerde dryfwerk. Die dokumentasie van die volledige bedryfsrekord van die mikrotunnelmasjien-dryf — insluitend stuurinsette, perskragte en rigtinglesings — skep ’n projekkennisbasis wat die noukeurigheid van beplanning vir daaropvolgende soortgelyke projekte verbeter.
VEE
Wat is die kleinste kurwe-radius wat ’n mikrotunnelmasjien tipies kan bereik?
Die minimum bereikbare kurwe-radius vir 'n mikrotunnelmasjien hang af van die masjienmodel, pypdeursnee, scharnierontwerp en grondtoestande. Baie moderne masjiene met dubbel-scharnierstuurstelsels kan in gunstige grondtoestande met kleiner pypdeursnees kurwe-radii so styf as 30 tot 50 meter bereik. Standaardmasjiene sonder gespesialiseerde scharniering is gewoonlik beperk tot radii van 100 meter of meer. Raadpleeg altyd die toerustingvervaardiger se spesifikasies en voer 'n projekspesifieke haalbaarheidsbeoordeling uit voordat u aan 'n styf-kurwe-aandrywingplan vasgehou word.
Verhoog 'n kurwe met 'n radius van 50 meter die benodigde stootkrag beduidend?
Ja, gekurweerde dryfwerk veroorsaak inherente hoër hefkrags wat 'n reguit dryfwerk van gelyke lengte sou doen. Die assimetriese wrywingsverspreiding langs die buiteboog van die kurwe, tesame met die stuurweerstand van die grond, verhoog die totale stootvereiste op die mikrotunnelmasjien se hefstelsel. Afhangende van grondtipe, pypdeursnee en effektiwiteit van smeer, kan hefkrags op gekurweerde dryfwerk 20 tot 50 persent hoër wees as dié van vergelykbare reguit dryfwerk. Dit moet in ag geneem word by die berekening van hefkrags en die beoordeling van die pyp se strukturele kapasiteit tydens die ontwerpfase.
Kan die rigtingsstelsel 'n mikrotunnelmasjien akkuraat deur 'n kurwe met 'n radius van 50 meter volg?
Standaard laser-gebaseerde rigtingsstelsels is ontwerp vir reguit dryfwerk en kan nie 'n mikrotunnelmasjien akkuraat deur 'n nou boog volg nie. Vir dryfwerk met 'n boogradius van 50 meter word giroskopiese rigtingsstelsels of outomatiese totaalstasie-stelsels vereis. Hierdie tegnologieë verskaf voortdurende drie-dimensionele posisie-opdaterings wat die operateur in staat stel om die uitlyning relatief tot die ontwerpte boog in werklike tyd te monitor. Die keuse van die toepaslike rigtings-tegnologie is een van die belangrikste voor-konstruksiebesluite vir enige gekurwe mikrotunnel-dryfprojek.
Is 'n mikrotunnel-dryf met 'n radius van 50 meter geskik vir alle pypdeursnitte?
‘n Radius van 50 meter is makliker bereikbaar met kleiner pypdeursnitte, gewoonlik onder 800 mm, waar korter pypsegmente en meer buigsame verbindingstelsels die vereiste hoekafbuiging per verbinding kan akkommodeer. Vir groter deursnitte bo 1000 mm word dit beduidend meer uitdagend om ‘n radius van 50 meter te bereik, en dit mag spesiaal ontwerpte kortpypsegmente, gewysigde verbindingstelsels en ‘n mikrotunnelmasjien met verbeterde stuurvermoë vereis. Elke toepassing moet individueel geëvalueer word op grond van die pypgeometrie, verbindingsspesifikasies en die gekose masjien se stuurvermoë.
Tabel van inhoud
- Verstaan van gekurwe aandrywingvermoë in mikrotunneling
- Pypdeursnee, Pypmateriaal en Hul Effek op Kurwe-navigasie
- Grondtoestande en grondgedrag tydens gekurweerde dryfwerk
- Beplanning- en uitvoeringsoorwegings vir 50-meter-radius-aandrywings
-
VEE
- Wat is die kleinste kurwe-radius wat ’n mikrotunnelmasjien tipies kan bereik?
- Verhoog 'n kurwe met 'n radius van 50 meter die benodigde stootkrag beduidend?
- Kan die rigtingsstelsel 'n mikrotunnelmasjien akkuraat deur 'n kurwe met 'n radius van 50 meter volg?
- Is 'n mikrotunnel-dryf met 'n radius van 50 meter geskik vir alle pypdeursnitte?