
 EN
EN
 AR
AR BG
BG HR
HR CS
CS FR
FR DE
DE EL
EL HI
HI IT
IT JA
JA KO
KO RO
RO RU
RU ES
ES TL
TL ID
ID LT
LT SK
SK SL
SL UK
UK VI
VI ET
ET TH
TH TR
TR FA
FA AF
AF MS
MS HY
HY AZ
AZ KA
KA BN
BN LO
LO LA
LA MN
MN NE
NE MY
MY KK
KK UZ
UZ KY
KY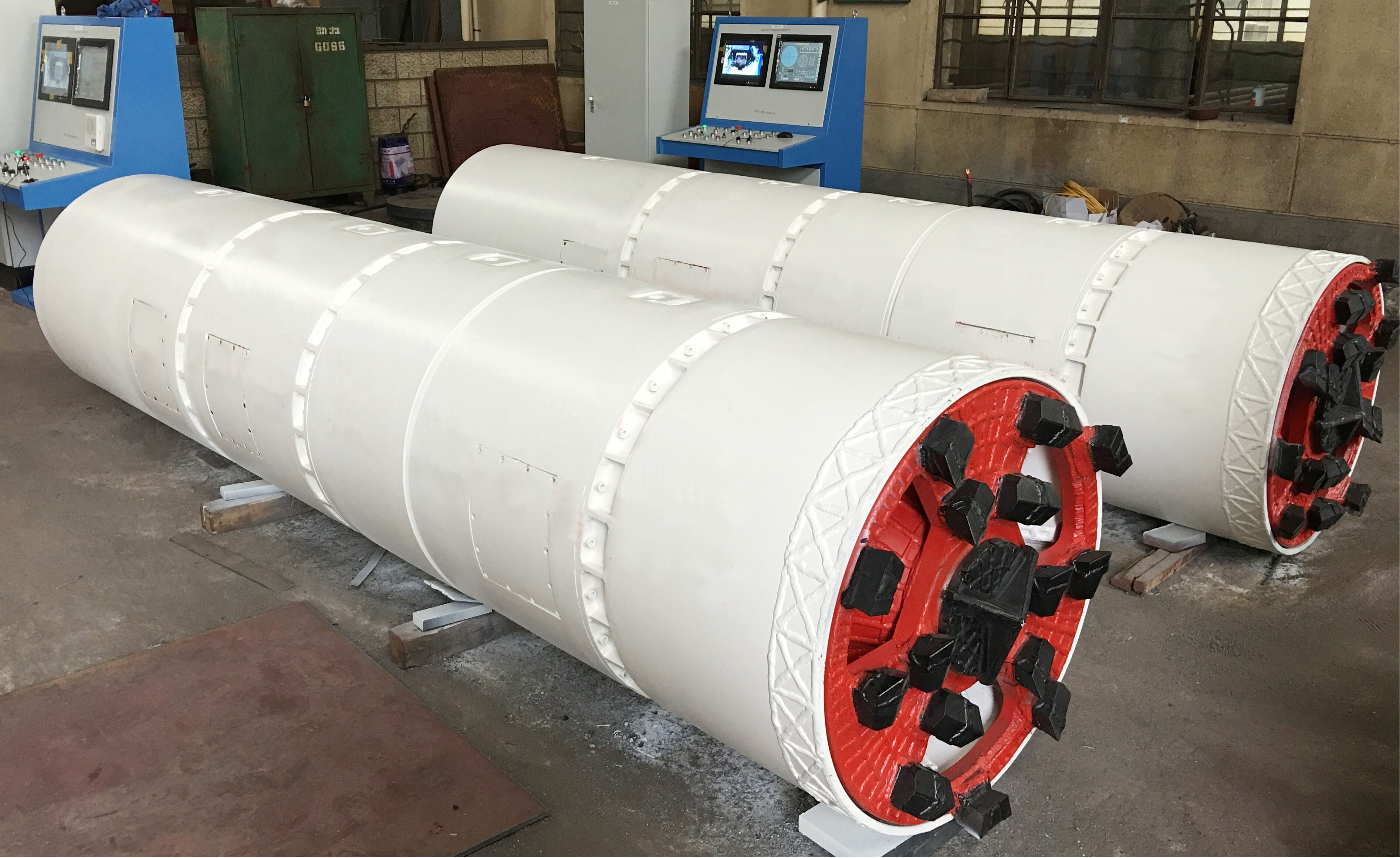
जब भूगर्भिक उपयोगिता ठेकेदारहरू सँकरा शहरी गल्लीहरू, नदी पार गर्ने क्षेत्रहरू वा आधारभूत संरचना-घनी क्षेत्रहरूको सामना गर्छन्, एउटा महत्त्वपूर्ण प्रश्न अवश्यै उठ्छ: के माइक्रोटनेलिङ मेशिन ५० मिटर त्रिज्या भएको वक्रमा सँगै अगाडि बढ्न सक्छ? यो कुनै अमूर्त इन्जिनियरिंग प्रश्न होइन। यो सिधै निर्धारण गर्छ कि कुनै ट्रेन्चलेस स्थापना परियोजना सम्भव छ कि छैन, कति पूर्व-योजना आवश्यक छ, र मोबिलाइजेशन अघि कुन कुन उपकरण विशिष्टताहरूलाई प्राथमिकता दिनुपर्छ।

छोटो उत्तर हो हो — उपयुक्त अवस्थामा, माइक्रोटनलिङ मेशिनले ५० मिटर त्रिज्याको वक्रता पूरा गर्न सक्छ। तर, यो क्षमता सबै प्रकारका उपकरणहरू, पाइप व्यासहरू वा माटोका प्रोफाइलहरूमा सार्वभौमिक रूपमा लागू हुँदैन। संवेदनशील शहरी वातावरणको तल विश्वसनीय परिणामहरू प्राप्त गर्न आवश्यक भएका परियोजना स्वामीहरू, डिजाइन इन्जिनियरहरू र निर्माण टोलीहरूका लागि माइक्रोटनलिङमा वक्रता चालनको इन्जिनियरिङ तर्क, सञ्चालन सीमाहरू र निर्णय आधारहरूको बारेमा बुझ्नु आवश्यक छ।
माइक्रोटनलिङमा वक्रता चालन क्षमताको बारेमा बुझ्नु
माइक्रोटनलिङ ज्यामितिमा वक्रताको परिभाषा के हो
ट्रेन्चलेस इन्जिनियरिङमा, वक्रलाई यसको त्रिज्या द्वारा परिभाषित गरिन्छ — त्रिज्या जति छोटो हुन्छ, माइक्रोटनलिङ मेसिनका लागि नेभिगेसन चुनौती पनि उत्तिकै कठिन हुन्छ। उद्योगका मापदण्डअनुसार ५० मिटरको त्रिज्या एउटा कडा वक्र मानिन्छ। यसलाई सन्दर्भमा राख्दा, धेरै सामान्य माइक्रोटनलिङ ड्राइभहरू सिधा संरेखण वा २०० मिटर भन्दा बढी त्रिज्याका हल्का वक्रहरूका लागि डिजाइन गरिएका हुन्छन्। ५० मिटरमा घटाउँदा ज्यामितीय र यान्त्रिक जटिलता उत्पन्न हुन्छ जुन उपकरणको डिजाइन र ड्राइभ योजना दुवैमा इन्जिनियरिङ गर्नुपर्ने हुन्छ।
वक्रता त्रिज्या सीधैँ निर्धारण गर्छ कि प्रत्येक पाइप जोड वा मेशिनको कुनै घुमाउने बिन्दुमा स्टियरिङ प्रणालीले कति कोणीय विचलन प्राप्त गर्नुपर्छ। ५० मिटरको त्रिज्यामा संचालित हुने माइक्रोटनलिङ मेशिनको लागि, प्रत्येक पाइप खण्डमा कोणीय अफसेट उल्लेखनीय हुन्छ, विशेषगरी जब पाइपको व्यास बढ्छ। इन्जिनियरहरूले पाइपको लम्बाइ, पाइपको सामग्री र जोडको प्रकार आधारमा अनुमति दिइएको जोड विचलन कोणहरूको गणना गर्नुपर्छ ताकि ड्रिलिङ सुरु गर्नुभन्दा अघि ज्यामितीय सम्भाव्यता पुष्टि गर्न सकियोस्।
वक्र ड्राइभको समयमा सटीकता बनाए राख्न लेजर मार्गदर्शन र जायरोस्कोपिक नेभिगेसन प्रणाली दुई प्राथमिक उपकरणहरू हुन्। एक सामान्य लेजर मार्गदर्शन प्रणाली सिधा रेखा सन्दर्भमा सीमित हुन्छ, जसले गर्दा यो तंग वक्रहरूको नेभिगेसनको लागि अपर्याप्त हुन्छ। माइक्रोटनलिङ मेशिनको अपरेटरले ५० मिटर त्रिज्याको संरेखण सटीकतासँग कार्यान्वयन गर्न र बनाए राख्न आवश्यक रियल-टाइम स्थिति प्रतिक्रिया प्रदान गर्न जायरोस्कोपिक वा स्वचालित टोटल स्टेशन प्रणालीहरू आवश्यक हुन्छन्।
घुमाउने प्रणालीहरू र स्टियरिङ यान्त्रिकी
एक माइक्रोटनलिंग मेशिनको वक्र रेखा अनुसरण गर्ने क्षमता मूलतः यसको आर्टिकुलेसन प्रणालीमा निर्भर गर्दछ। धेरै आधुनिक माइक्रोटनलिंग मेशिनहरूमा स्टीयरिंग सिलिण्डरहरू लगाइएका हुन्छन् जसले कटरहेडलाई मुख्य शरीरसँग तुलना गर्दा असममित थ्रस्ट लागू गरेर पुनर्निर्देशन गर्दछन्। सिधा ड्राइभहरूमा, यी सिलिण्डरहरूलाई साना परिवर्तनहरूका लागि प्रयोग गरिन्छ। वक्र ड्राइभहरूमा, यी सिलिण्डरहरूलाई सम्पूर्ण ड्राइभ लम्बाइभरि डिजाइन गरिएको त्रिज्या कायम राख्नका लागि निरन्तर र सटीक रूपमा संचालन गर्नुपर्दछ।
केही माइक्रोटनलिंग मेशिनहरूमा डबल-आर्टिकुलेसन डिजाइन छ, जसले अतिरिक्त घुमाउने बिन्दु प्रदान गर्दछ र कोणीय स्टीयरिंग सीमा विस्तारित गर्दछ। यो व्यवस्था विशेष गरी सानो त्रिज्या भएका अनुप्रयोगहरूका लागि महत्त्वपूर्ण छ, किनकि यसले स्टीयरिंग सिलिण्डरहरूमा यान्त्रिक तनाव घटाउँदछ र ज्यामितीय आवश्यकतालाई एउटा नभएर दुई आर्टिकुलेसन जोडहरूमा वितरण गर्दछ। ५० मिटर त्रिज्या भएको ड्राइभका लागि, डबल-आर्टिकुलेसन मेशिनहरूले प्रायः एकल-आर्टिकुलेसन डिजाइनहरूभन्दा सट्यता र यान्त्रिक विश्वसनीयतामा उत्तम प्रदर्शन गर्दछन्।
स्टियरिङ प्रणालीको हाइड्रोलिक प्रतिक्रिया गति र आनुपातिक नियन्त्रण क्षमता पनि महत्त्वपूर्ण हुन्छन्। नरम भूमि वा परिवर्तनशील माटोको अवस्थामा, माइक्रोटनेलिङ मेसिनले अप्रत्याशित पार्श्व बलहरूको सामना गर्न सक्छ जसले यसलाई संरेखणबाट बाहिर धकेल्न सक्छ। छिटो हाइड्रोलिक प्रतिक्रिया र सूक्ष्म आनुपातिक नियन्त्रण सँगको स्टियरिङ प्रणालीले अपरेटरहरूलाई अत्यधिक सुधार नगरी नै साना, निरन्तर सुधारहरू गर्न सक्षम बनाउँछ, जुन एउटा चिकनो वक्र पथ कायम राख्नका लागि आवश्यक छ—जुन अभिप्रेत चापसँग मिल्दोजुल्दो हुन्छ, तर कोणीय विचलनहरूको श्रृंखला सिर्जना गर्दैन।
पाइपको व्यास, पाइपको सामग्री, र तिनीहरूको वक्र नेभिगेसनमा प्रभाव
पाइपको व्यासले न्यूनतम वक्र त्रिज्यालाई कसरी सीमित गर्छ
पाइपको व्यास माइक्रोटनलिंग मेशिनले ५० मिटरको त्रिज्या भएको वक्र प्राप्त गर्न सक्छ कि सक्दैन भन्ने निर्धारण गर्ने सबैभन्दा प्रभावशाली कारकहरूमध्ये एक हो। जब पाइपको व्यास बढ्छ, त्यसैसँगै व्यक्तिगत पाइप खण्डहरूको लम्बाइ पनि सामान्यतया बढ्छ, र लामा खण्डहरूले समान वक्र पथ अनुसरण गर्नका लागि प्रत्येक जोडमा ठूलो कोणीय अफसेट सिर्जना गर्छन्। यसको अर्थ यो हो कि ५० मिटरको त्रिज्या ३०० मिमी देखि ६०० मिमी सम्मको सामान्यतया सानो व्यासका पाइपहरूसँग प्राप्त गर्न सजिलो हुन्छ, जबकि १००० मिमी भन्दा ठूलो व्यासका स्थापनाहरूसँग भने यो कठिन हुन्छ।
ठूलो व्यासका माइक्रोटनलिंग मेशिन अनुप्रयोगहरूका लागि ठेकेदारहरूले प्रति जोड कोणीय आवश्यकता घटाउन व्यक्तिगत पाइप खण्डहरूको लम्बाइ छोटो बनाउनु पर्दछ। छोटो ज्याकिंग पाइप प्रयोग गर्दा वक्रको ज्यामितीय अखण्डता कायम राखिन्छ जबकि पाइप जोडहरूमा अत्यधिक तनाव सान्द्रण रोकिन्छ। यो परिवर्तन खरिद चरणमा नै निर्दिष्ट गर्नुपर्छ, किनकि मानक ज्याकिंग पाइप निर्माताहरूले वक्र ड्राइभ अनुप्रयोगहरूका लागि अनुरोध गर्दा मर्यादित लम्बाइका खण्डहरू उपलब्ध गराउँछन्।
पाइपको व्यास र वक्रता त्रिज्याबीचको सम्बन्ध सरल रैखिक होइन। यसमा पाइपको जडत्वको क्षण, पाइपको बाह्य सतह र आसपासको भूमिबीचको सम्पर्क दबाव, र ड्राइभ अगाडि बढ्दै गर्दा ज्याकिङ बलहरूको संचयी प्रभाव समावेश छन्। सूक्ष्म सुरङ्गीकरण मेशिनलाई साइटमा लगिएको अघि ५० मिटरको त्रिज्यासँग चयन गरिएको पाइपको व्यास सँग सङ्गत हुने कुरा प्रमाणित गर्न योग्य भू-तकनीकी र संरचनात्मक इन्जिनियरद्वारा जाँच गर्नुपर्छ।
कडा वक्र ड्राइभहरूको लागि पाइप सामग्रीको चयन
सबै पाइप सामग्रीहरूले वक्र माइक्रोटनलिङ ड्राइभको समयमा उत्पन्न हुने बेन्डिङ र कोणीय बलहरूको सामना गर्दा समान रूपमा प्रदर्शन गर्दैनन्। मानक माइक्रोटनलिङ मेसिन अनुप्रयोगहरूमा व्यापक रूपमा प्रयोग गरिने प्रबलित कंक्रिट ज्याकिङ पाइपहरूले, उचित जोड डिजाइनहरू (जस्तै कुशन प्याडहरू र जोड सीमामा तनाव समान रूपमा वितरण गर्ने यन्त्रीकृत अन्त्य अनुहारहरू) सँग उचित रूपमा निर्दिष्ट भएमा, वक्र ड्राइभहरू सँगै काम गर्न सक्छन्। तथापि, कंक्रिट पाइपहरूको कोणीय विचलन सहनशीलता सीमित हुन्छ, जसलाई वक्र डिजाइनको समयमा अवश्य ध्यानमा राख्नुपर्छ।
स्टील पाइपहरू, फाइबरग्लास पाइपहरू, र पोलिमर कंक्रिट पाइपहरूले टाइट-रेडियस अनुप्रयोगहरूका लागि फाइदाजनक हुन सक्ने विभिन्न यांत्रिक गुणहरू प्रदान गर्दछन्। उदाहरणका लागि, स्टील पाइपहरूले जोडहरूमा बढी विक्षेपण सहन गर्न सक्छन् र स्थानीय बेन्डिङ तनावविरुद्ध उच्च प्रतिरोध प्रदान गर्दछन्। तथापि, यसले जस्तै जंग रोकथाम, वेल्डिङ आवश्यकताहरू, र कार्यस्थलमा ह्यान्डलिङ लजिस्टिक्स जस्ता अन्य विचारहरू पनि प्रस्तुत गर्दछ। पाइप सामग्रीको छनौट माइक्रोटनलिङ मेशिनको विन्यासको छनौटसँगै गर्नुपर्छ, र दुवैलाई एकीकृत इन्जिनियरिङ प्रणालीको रूपमा व्यवहार गर्नुपर्छ।
पाइप जोडको डिजाइन पनि समान रूपमा महत्त्वपूर्ण छ। ५० मिटरको त्रिज्या मा काम गर्ने माइक्रोटनलिङ मेशिनको लागि, जोडहरूले पर्याप्त कोणीय लचकता प्रदान गर्नुपर्छ जबकि ज्याकिङ लोडहरू स्थानान्तरण गर्न पर्याप्त संरचनात्मक शक्ति पनि बनाए राख्नुपर्छ। आवश्यक कोणीय गतिलाई अनुमति दिन सामान्यतया विशेष रूपमा डिजाइन गरिएका गोलाकार वा शंक्वाकार जोडका अगाडिका सतहहरू, जुन संपीड्य तकिया प्याडहरूसँग संयोजित छन्, निर्दिष्ट गरिन्छन्, जसले पाइपमा तनाव सान्द्रण सिर्जना नगरी र जलरोधी सीललाई कमजोर नबनाईकन आवश्यक गति सुनिश्चित गर्छ।
घुमाउरो ड्राइभको समयमा माटोको अवस्था र भूमिको व्यवहार
स्टियरिङ प्रदर्शनमा माटोको प्रकारको प्रभाव
माइक्रोटनलिंग मेसिनले अगाडि बढ्दा पार गर्ने माटोको प्रोफाइलले यसको कडा वक्रतामा नेभिगेट गर्ने क्षमतामा सिधा प्रभाव पार्छ। माटो जस्ता संसक्त माटोहरूमा भूमि तुलनात्मक रूपमा स्थिर पार्श्व समर्थन प्रदान गर्छ र भविष्यवाणी गर्न सकिने व्यवहार देखाउँछ, जसले स्थिर वक्र अभिसरण कायम राख्न सजिलो बनाउँछ। माइक्रोटनलिंग मेसिनले अचानक पार्श्व विस्थापनहरू ट्रिगर नगरी चालन सुधारहरू चरणबद्ध रूपमा लागू गर्न सक्छ, जुन ५० मिटर त्रिज्या भएको सुग्घर र सटिक ड्राइभ प्राप्त गर्न आवश्यक छ।
रेत वा ग्रेभल जस्ता कणीय माटोमा स्थिति अझ जटिल हुन्छ। यी सामग्रीहरूले कम पार्श्व संसक्ति प्रदान गर्दछन्, जसको अर्थ छ कि माइक्रोटनलिङ मेसिनको चारैतिरको भूमि स्टियरिङ बलहरू लागू गर्दा सर्न वा स्थानान्तरित हुन सक्छ। यदि अपरेटरले अग्रगामी दर र स्टियरिङ इनपुटहरूलाई ठीकसँग नियन्त्रण गर्दैन भने, यसले नियन्त्रणबाहिरको अत्यधिक स्टियरिङ वा संरेखण विचलनको जोखिम सिर्जना गर्दछ। जलयुक्त कणीय माटोमा, भूमि ह्रास रोक्नका लागि फेस दबाव प्रबन्धन अझ बढी महत्त्वपूर्ण हुन्छ, जुन संरेखणलाई थप अस्थिर बनाउँदछ।
मिश्रित-अनुहार अवस्था — जहाँ माइक्रोटनलिंग मेसिन विभिन्न माटोका प्रकारहरूका एकान्तर स्तरहरू वा थैलीहरूसँग सामना गर्दछ — कर्भ ड्राइभ कार्यान्वयनको लागि सबैभन्दा चुनौतीपूर्ण अवस्था हो। कटरहेडमा भिन्न प्रतिरोधले अनियोजित यॉ (yaw) वा पिच (pitch) बलहरू सिर्जना गर्न सक्छ जुन निर्धारित स्टियरिङ दिशासँग विरोधाभास गर्दछ। मिश्रित-अनुहार अवस्थामा आयोजित परियोजनाहरूमा विस्तृत पूर्व-निर्माण माटो अनुसन्धान समावेश गर्नुपर्ने हुन्छ, र चयन गरिएको माइक्रोटनलिंग मेसिनमा यी संक्रमणहरू प्रबन्धन गर्न पर्याप्त टर्क क्षमता र अनुहार दबाव नियन्त्रण हुनुपर्ने हुन्छ जसले संरेखण नियन्त्रण गुमाउनु नहुने गरी।
वक्रहरूमा लुब्रिकेसन र एन्युलर खाली स्थान प्रबन्धन
वक्राकार माइक्रोटनलिंग ड्राइभको समयमा, पाइप स्ट्रिंग बोर्ड एनुलसभित्र पूर्णतया समकेन्द्रिक पथमा यात्रा गर्दैन। वक्रको ज्यामितिले पाइपलाई बाहिरी चापको तर्फको माटोमा दबाउँछ, जसले त्यो पक्षमा घर्षण बढाउँछ। उचित स्नेहन प्रबन्धन नभएमा, यो असममित घर्षणले स्टीयरिङ प्रतिरोध उत्पन्न गर्न सक्छ जुन माइक्रोटनलिंग मेसिनको सुधार क्षमतालाई अतिक्रमण गर्न सक्छ, र ड्राइभलाई निर्धारित वक्र संरेखणबाट हटाउँछ।
ज्याकिङ स्ट्रिंगमा वितरित स्नेहन पोर्टहरू मार्फत बेन्टोनाइट स्लरी इन्जेक्सन यस घर्षण घटाउन प्रयोग गरिने मानक विधि हो। वक्राकार ड्राइभहरूको लागि, स्नेहन योजना असममित घर्षण वितरणलाई ध्यानमा राखेर अनुकूलित गर्नुपर्छ। सन्तुलित स्नेहन प्राप्त गर्न र पाइप स्ट्रिंगलाई माटोको सीमामा तिर सर्नबाट रोक्न वक्रको बाहिरी चापको तर्फको इन्जेक्सन दर भित्री चापको तर्फको दरभन्दा बढी हुन सक्छ।
उचित स्नेहनले मात्र ज्याकिङ बलको आवश्यकता कम गर्दैन, तर यसले पाइप जोडहरूलाई असममित भूमि सम्पर्कबाट हुने अत्यधिक पार्श्व लोडबाट पनि सुरक्षा प्रदान गर्दछ। माइक्रोटनलिङ मेसिनको परियोजना प्रबन्धकले विधि विवरणमा घुमाउरो-चालित स्नेहन प्रोटोकलहरू समावेश गर्नुपर्छ, जसमा इन्जेक्सन मात्रा लक्ष्यहरू, दबाव सीमाहरू र निगरानी अन्तरालहरू निर्दिष्ट गर्नुपर्छ जुन ५० मिटर त्रिज्या भएको संरेखणको विशिष्ट आवश्यकताहरूलाई प्रतिबिम्बित गर्दछ, जुन मानक सिधा-चालित स्नेहन योजनामा आधारित हुँदैन।
५०-मिटर त्रिज्या चालित ड्राइभहरूका लागि योजना र कार्यान्वयन विचारहरू
निर्माण पूर्व इन्जिनियरिङ आवश्यकताहरू
५० मिटर त्रिज्यामा माइक्रोटनलिङ मेशिन प्रयोग गरेर वक्राकार ड्राइभ गर्नु एक सामान्य सिधा ड्राइभ भन्दा उच्च स्तरको पूर्व-निर्माण इन्जिनियरिङ माग गर्दछ। परियोजना टोलीले त्रि-आयामिक समन्वयहरूमा वक्र ज्यामितिलाई निर्दिष्ट गर्ने विस्तृत संरेखण आरेखहरू तयार गर्नुपर्छ, जसले मार्गदर्शन प्रणालीलाई ड्राइभ पथको नियमित अन्तरालमा सही लक्ष्य स्थितिहरूमा कार्यक्रमित गर्न सक्छ। यी आरेखहरूले यो पनि पुष्टि गर्नुपर्छ कि चयन गरिएको पाइप प्रणालीले जोड विक्षेपण सीमा अतिक्रमण नगरी वक्रलाई ज्यामितिक रूपमा अनुसरण गर्न सक्छ।
वक्र ड्राइभहरूको लागि ज्याकिङ बल गणना गर्दा वक्र संरेखणबाट उत्पन्न हुने अतिरिक्त घर्षण र स्टीयरिङ प्रतिरोध समावेश गर्नुपर्छ। कुनै समय कुनै अन्तरवर्ती ज्याकिङ स्टेशनहरू — जसलाई कहिमा इन्टरज्याकहरू भनिन्छ — आवश्यक हुन सक्छन् जसले पाइप स्ट्रिङमा कुल ज्याकिङ लोड वितरण गर्ने र संचित बलले अनुमत गरिएको पाइप लोड क्षमता भन्दा बढ्न नदिने गरी डिजाइन गरिन्छ। इन्टरज्याकहरूको संख्या र स्थापना स्थान डिजाइन गर्दा परियोजनासँग सम्बन्धित विशिष्ट वक्र ज्यामिति, माटोको घर्षण गुणांक र पाइपको सामग्री गुणहरूमा आधारित हुनुपर्छ।
लञ्च शाफ्ट र प्राप्ति शाफ्टलाई माइक्रोटनेलिङ मेसिनको प्रवेश र निकास कोणहरूको लागि अनुकूलित गर्न आवश्यक छ, जुन वक्राकार संरेखणद्वारा परिभाषित गरिएको छ। यदि वक्र लञ्च पछि तुरुन्तै सुरु हुन्छ भने, शाफ्टको ज्यामितिले मेसिनलाई शाफ्टको भित्ता वा प्रवेश सीलद्वारा बाधित नभएको अवस्थामा नियन्त्रण सुधार सुरु गर्न अनुमति दिनुपर्छ। यी निर्माण विवरणहरू प्रायः प्रारम्भिक परियोजना योजना चरणमा उपेक्षा गरिन्छन्, तर यदि मेसिनको स्थानान्तरण अघि यी समस्याहरू समाधान नगरिएमा यो परियोजनाको कार्यक्रममा गम्भीर अवरोधहरू ल्याउन सक्छ।
सञ्चालन निगरानी र वास्तविक समयमा सुधार
वक्राकार ड्राइभ गर्दा वास्तविक समयमा निगरानी गर्नु अनिवार्य छ — यो मौलिक संचालन आवश्यकता हो। माइक्रोटनलिङ मेशिन अपरेटरले निर्देशन प्रणालीबाट स्थिति सम्बन्धी डाटा, थ्रस्ट फ्रेम र इन्टरज्याक स्टेशनहरूबाट ज्याकिङ बलको मापन, र कटरहेडका उपकरणहरूबाट अगाडिको दबावको प्रतिक्रिया सम्बन्धी डाटामा निरन्तर पहुँच राख्नुपर्छ। यी डाटा प्रवाहहरू सँगै मिलेर अपरेटरले समयमै संरेखण विचलनहरू थाहा पाउन सक्छन् र विचलनले स्वीकार्य सहनशीलताभन्दा बाहिर नजाउन अघि सुधारात्मक स्टीयरिङ इनपुटहरू लागू गर्न सक्छन्।
अग्रगामी दर प्रबन्धन वक्र ड्राइभहरूमा एक महत्त्वपूर्ण संचालन चर हो। धेरै छिटो अग्रगामी हुँदा स्टीयरिङ्को सुधार गर्न उपलब्ध समय कम हुन्छ र व्यक्तिगत पाइप कनेक्सनहरूमा जोड विक्षेपण सीमा अतिक्रमण गर्ने जोखिम बढ्छ। धेरै ढिलो अग्रगामी हुँदा वलयाकार स्नेहन बग्न वा सघाउन सक्छ, जसले घर्षण बढाउँछ र स्टीयरिङ्लाई अझ गाह्रो बनाउँछ। अनुभवी माइक्रोटनलिङ्ग मेशिन अपरेटरहरूले यो सन्तुलनलाई बुझ्छन् र निर्माण पूर्व योजना अवधिमा निर्धारित निश्चित दर अनुसरण नगरी वास्तविक समयको प्रतिक्रियाको आधारमा अग्रगामी दरहरू सक्रिय रूपमा समायोजित गर्छन्।
ड्राइभ पछिको वास्तविक अवस्था सम्बन्धी सर्वेक्षणहरू पनि स्थापित पाइप प्रणालीले निर्दिष्ट सहनशीलताभित्र ५० मिटरको त्रिज्या भएको डिजाइन गरिएको संरेखण पालना गरेको छ कि भनेर पुष्टि गर्न उत्तिकै महत्त्वपूर्ण हुन्छन्। वास्तविक अवस्था सम्बन्धी सर्वेक्षणको समयमा चिन्हाएका विचलनहरूले ग्राउटिङ वा जोइन्ट समायोजन जस्ता सुधारात्मक कार्यहरूको आवश्यकता पर्न सक्छ, र यी विचलनहरूले भविष्यका घुमाउरो ड्राइभहरूका लागि मूल्यवान पाठहरू प्रदान गर्छन्। माइक्रोटनलिङ मेशिनको ड्राइभको पूर्ण संचालन रेकर्ड — जसमा स्टीयरिङ इनपुटहरू, ज्याकिङ बलहरू, र गाइडेन्स पठनहरू समावेश छन् — को दस्तावेजीकरण गर्नाले एउटा परियोजना ज्ञान आधार सिर्जना गर्छ जसले पछिका समान परियोजनाहरूको योजना निर्माणको सटीकता सुधार्छ।
प्रश्नोत्तर (FAQ)
माइक्रोटनलिङ मेशिनले सामान्यतया कति नै सानो घुमाउरो त्रिज्या प्राप्त गर्न सक्छ?
माइक्रोटनलिंग मेशिनको न्यूनतम प्राप्तव्य वक्र त्रिज्या मेशिनको मोडल, पाइपको व्यास, कार्टिकुलेशन डिजाइन र माटोको अवस्थामा निर्भर गर्दछ। धेरै आधुनिक मेशिनहरू जसमा डबल-आर्टिकुलेशन स्टीयरिंग प्रणाली छ, सानो पाइप व्यास र अनुकूल भूमि अवस्थामा ३० देखि ५० मिटरसम्मका तंग त्रिज्याहरू प्राप्त गर्न सक्छन्। विशेष कार्टिकुलेशन बिना रहेका मानक मेशिनहरू सामान्यतया १०० मिटर वा त्यसभन्दा बढीका त्रिज्यामा सीमित हुन्छन्। सँधै उपकरण निर्माताको विशिष्टताहरू सँग परामर्श गर्नुहोस् र तंग-त्रिज्या ड्राइभ योजनामा प्रतिबद्ध हुनु अघि परियोजना-विशिष्ट सम्भाव्यता मूल्याङ्कन गर्नुहोस्।
५० मिटर त्रिज्याको वक्रले आवश्यक ज्याकिंग बलमा उल्लेखनीय रूपमा वृद्धि गर्छ?
हो, वक्राकार ड्राइभहरूले समान लम्बाइका सिधा ड्राइभहरूको तुलनामा स्वतः उच्च ज्याकिङ बलहरू उत्पन्न गर्छन्। वक्रको बाहिरी चापको साथ असममित घर्षण वितरण र माटोबाट आउने स्टियरिङ प्रतिरोधको संयोजनले माइक्रोटनलिङ मेसिनको ज्याकिङ प्रणालीमा कुल थ्रस्ट माग बढाउँछ। माटोको प्रकार, पाइपको व्यास र स्नेहनको प्रभावकारितामा निर्भर गरी, वक्राकार ड्राइभहरूमा ज्याकिङ बलहरू समकक्ष सिधा ड्राइभहरूको तुलनामा २० देखि ५० प्रतिशत सम्म अधिक हुन सक्छन्। यसलाई डिजाइन चरणमा ज्याकिङ बल गणना र पाइपको संरचनात्मक क्षमता मूल्याङ्कनमा अवश्य समावेश गर्नुपर्छ।
के गाइडेन्स प्रणालीले ५० मिटर त्रिज्याको वक्र मार्फत माइक्रोटनलिङ मेसिनलाई सटीक रूपमा ट्र्याक गर्न सक्छ?
मानक लेजर-आधारित मार्गदर्शन प्रणालीहरू सिधा ड्राइभहरूका लागि डिजाइन गरिएका हुन्छन् र यी प्रणालीहरूले सानो व्यासको सुरंग खनन मेशिनलाई कडा वक्रतामा सटीक रूपमा ट्र्याक गर्न सक्दैनन्। ५० मिटर त्रिज्याका वक्र ड्राइभहरूका लागि जायरोस्कोपिक मार्गदर्शन प्रणाली वा स्वचालित टोटल स्टेशन प्रणालीहरू आवश्यक हुन्छन्। यी प्रविधिहरूले निरन्तर त्रि-आयामी स्थितिगत अद्यावधिकहरू प्रदान गर्दछन्, जसले अपरेटरलाई डिजाइन गरिएको वक्रको सापेक्षमा समंजन (एलाइनमेन्ट) को वास्तविक समयमा निगरानी गर्न सक्षम बनाउँदछ। कुनै पनि वक्राकार सूक्ष्म-सुरंग खनन ड्राइभ परियोजनाका लागि उपयुक्त मार्गदर्शन प्रविधि छान्नु भनेको निर्माण अघि गरिने सबैभन्दा महत्त्वपूर्ण निर्णयहरू मध्ये एक हो।
के ५० मिटर त्रिज्याको सूक्ष्म-सुरंग खनन ड्राइभ सबै पाइप व्यासहरूका लागि उपयुक्त छ?
५० मिटरको त्रिज्या ८०० मिमी भन्दा कम व्यासका सानो नलीहरूसँग अधिक सजिलै प्राप्त गर्न सकिन्छ, जहाँ छोटो नली खण्डहरू र बढी लचिलो जोड संरचनाहरूले प्रत्येक जोडमा आवश्यक कोणीय विचलनलाई समायोजित गर्न सक्छन्। १००० मिमी भन्दा ठूलो व्यासका नलीहरूको लागि ५० मिटरको त्रिज्या प्राप्त गर्नु धेरै गाह्रो हुन्छ र यसको लागि विशेष रूपमा डिजाइन गरिएका छोटो लम्बाइका नली खण्डहरू, संशोधित जोड संरचनाहरू र बढी उन्नत दिशा नियन्त्रण क्षमताको साथको माइक्रोटनलिङ मेशिनको आवश्यकता पर्न सक्छ। प्रत्येक अनुप्रयोगलाई नलीको ज्यामिति, जोड विशिष्टताहरू र चयन गरिएको मेशिनको दिशा नियन्त्रण क्षमताको आधारमा व्यक्तिगत रूपमा मूल्याङ्कन गर्नुपर्छ।
विषय सूची
- माइक्रोटनलिङमा वक्रता चालन क्षमताको बारेमा बुझ्नु
- पाइपको व्यास, पाइपको सामग्री, र तिनीहरूको वक्र नेभिगेसनमा प्रभाव
- घुमाउरो ड्राइभको समयमा माटोको अवस्था र भूमिको व्यवहार
- ५०-मिटर त्रिज्या चालित ड्राइभहरूका लागि योजना र कार्यान्वयन विचारहरू
-
प्रश्नोत्तर (FAQ)
- माइक्रोटनलिङ मेशिनले सामान्यतया कति नै सानो घुमाउरो त्रिज्या प्राप्त गर्न सक्छ?
- ५० मिटर त्रिज्याको वक्रले आवश्यक ज्याकिंग बलमा उल्लेखनीय रूपमा वृद्धि गर्छ?
- के गाइडेन्स प्रणालीले ५० मिटर त्रिज्याको वक्र मार्फत माइक्रोटनलिङ मेसिनलाई सटीक रूपमा ट्र्याक गर्न सक्छ?
- के ५० मिटर त्रिज्याको सूक्ष्म-सुरंग खनन ड्राइभ सबै पाइप व्यासहरूका लागि उपयुक्त छ?