
 EN
EN
 AR
AR BG
BG HR
HR CS
CS FR
FR DE
DE EL
EL HI
HI IT
IT JA
JA KO
KO RO
RO RU
RU ES
ES TL
TL ID
ID LT
LT SK
SK SL
SL UK
UK VI
VI ET
ET TH
TH TR
TR FA
FA AF
AF MS
MS HY
HY AZ
AZ KA
KA BN
BN LO
LO LA
LA MN
MN NE
NE MY
MY KK
KK UZ
UZ KY
KY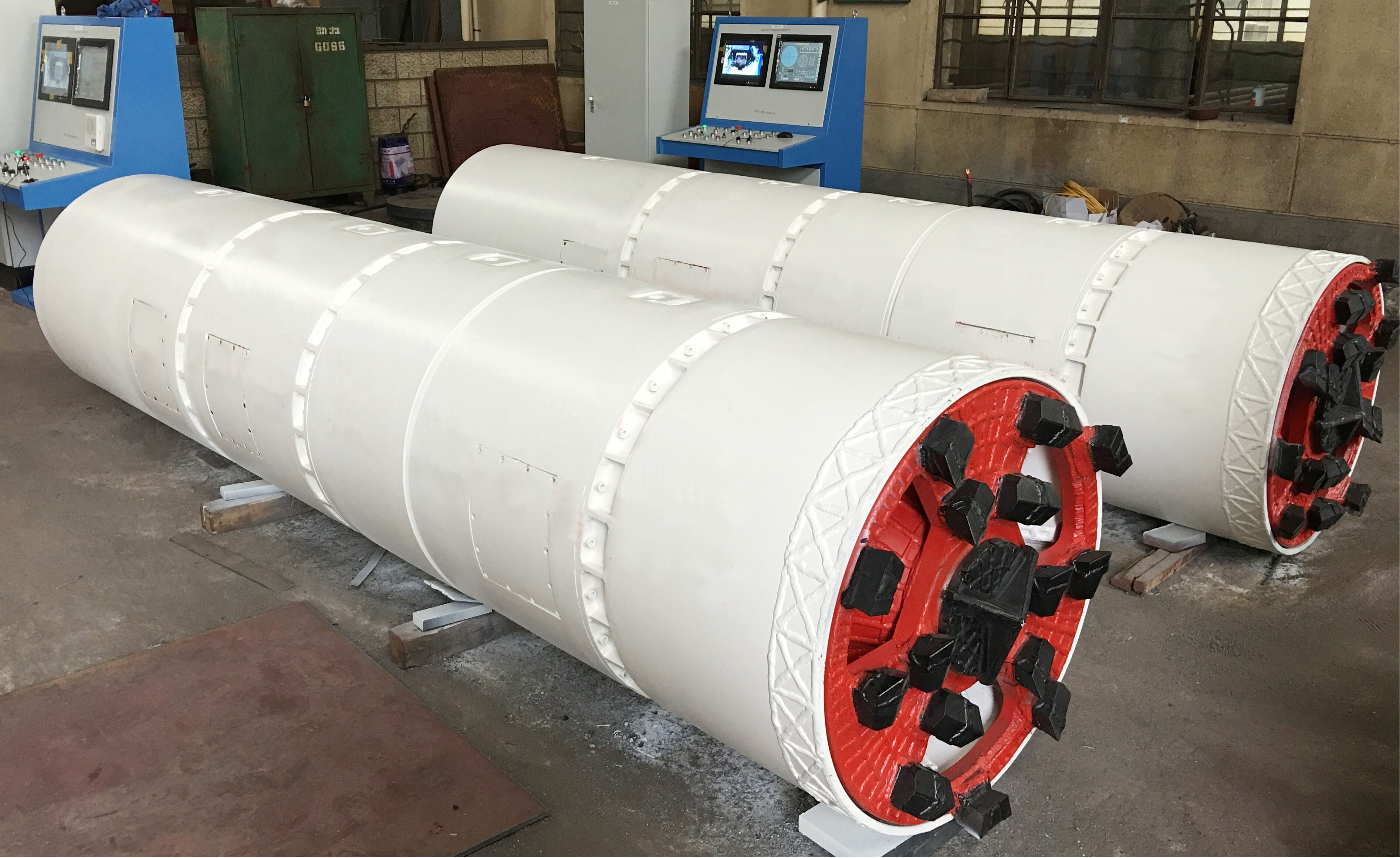
เมื่อผู้รับเหมาติดตั้งสาธารณูปโภคใต้ดินต้องเผชิญกับแนวทางในเขตเมืองที่แคบมาก การข้ามแม่น้ำ หรือพื้นที่ที่มีโครงสร้างพื้นฐานหนาแน่น คำถามสำคัญข้อหนึ่งจึงเกิดขึ้นอย่างหลีกเลี่ยงไม่ได้: สามารถ เครื่องไมโครท่อ เลี้ยวโค้งที่มีรัศมี 50 เมตรได้หรือไม่? คำถามนี้ไม่ใช่เพียงประเด็นเชิงวิศวกรรมเชิงทฤษฎีเท่านั้น แต่ส่งผลโดยตรงต่อความเป็นไปได้ของโครงการติดตั้งแบบไม่ขุดร่อง (trenchless installation) ปริมาณการวางแผนล่วงหน้าที่จำเป็น และข้อกำหนดเฉพาะของอุปกรณ์ที่ต้องให้ความสำคัญเป็นอันดับแรกก่อนเริ่มปฏิบัติงาน

คำตอบสั้นคือ ใช่ — ภายใต้เงื่อนไขที่เหมาะสม เครื่องขุดแบบไมโครทันเนลลิ่งสามารถขุดเส้นโค้งที่มีรัศมี 50 เมตรได้สำเร็จอย่างแน่นอน อย่างไรก็ตาม ความสามารถนี้ไม่สามารถใช้ได้กับอุปกรณ์ทุกประเภท ขนาดเส้นผ่านศูนย์กลางของท่อทุกขนาด หรือลักษณะของชั้นดินทุกแบบ ดังนั้น การเข้าใจหลักการทางวิศวกรรม ข้อจำกัดในการปฏิบัติงาน และเกณฑ์การตัดสินใจที่เกี่ยวข้องกับการขุดแบบไมโครทันเนลลิ่งในแนวโค้ง จึงเป็นสิ่งจำเป็นอย่างยิ่งสำหรับเจ้าของโครงการ วิศวกรออกแบบ และทีมงานก่อสร้าง ซึ่งต้องการผลลัพธ์ที่เชื่อถือได้ภายใต้สภาพแวดล้อมเมืองที่ละเอียดอ่อน
การเข้าใจความสามารถในการขุดในแนวโค้งของการขุดแบบไมโครทันเนลลิ่ง
อะไรคือองค์ประกอบที่กำหนดความโค้งในเรขาคณิตของการขุดแบบไมโครทันเนลลิ่ง
ในการวิศวกรรมแบบไม่ขุดร่อง (trenchless engineering) ความโค้งถูกกำหนดโดยรัศมีของมัน — ยิ่งรัศมีเล็กเท่าไร ความท้าทายด้านการนำทางสำหรับเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) ก็ยิ่งสูงขึ้นเท่านั้น รัศมี 50 เมตร จัดว่าเป็นความโค้งที่แคบตามมาตรฐานอุตสาหกรรม ทั้งนี้ เพื่อให้เห็นภาพชัดเจนยิ่งขึ้น เครื่องขุดอุโมงค์ขนาดเล็กแบบมาตรฐานส่วนใหญ่ได้รับการออกแบบมาเพื่อใช้งานกับแนวเส้นตรง หรือความโค้งที่ค่อยเป็นค่อยไปซึ่งมีรัศมีเกิน 200 เมตร การลดรัศมีลงเหลือ 50 เมตรจะก่อให้เกิดความซับซ้อนเชิงเรขาคณิตและเชิงกลอย่างมีน้ำหนัก ซึ่งจำเป็นต้องคำนึงถึงอย่างรอบคอบทั้งในการออกแบบอุปกรณ์และการวางแผนการขุด
รัศมีของเส้นโค้งมีผลโดยตรงต่อปริมาณการเบี่ยงเบนเชิงมุมที่ระบบพวงมาลัยต้องสร้างขึ้นที่แต่ละข้อต่อท่อหรือจุดข้อต่อของเครื่องจักร สำหรับเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) ที่ทำงานที่รัศมี 50 เมตร มุมเบี่ยงเบนต่อช่วงท่อหนึ่งช่วงจะมีค่าสูงอย่างมีนัยสำคัญ โดยเฉพาะเมื่อเส้นผ่านศูนย์กลางของท่อมีขนาดเพิ่มขึ้น วิศวกรจำเป็นต้องคำนวณมุมการเบี่ยงเบนที่ยอมรับได้ของข้อต่อท่อ โดยพิจารณาจากความยาวท่อ วัสดุที่ใช้ทำท่อ และประเภทของข้อต่อ เพื่อยืนยันความเป็นไปได้ด้านเรขาคณิตก่อนเริ่มการขุด
ระบบนำทางด้วยเลเซอร์และระบบนำทางด้วยไจโรสโคปเป็นเครื่องมือหลักสองชนิดที่ใช้รักษาความแม่นยำระหว่างการขุดตามแนวโค้ง ระบบนำทางด้วยเลเซอร์แบบดั้งเดิมมีข้อจำกัดในการให้ข้อมูลอ้างอิงตามแนวเส้นตรงเท่านั้น จึงไม่เหมาะสมสำหรับการนำทางตามเส้นโค้งที่มีรัศมีเล็กมาก จึงจำเป็นต้องใช้ระบบไจโรสโคปหรือระบบสถานีรวมอัตโนมัติ (automated total station) เพื่อให้ข้อมูลตำแหน่งแบบเรียลไทม์ที่ผู้ปฏิบัติงานเครื่องขุดอุโมงค์ขนาดเล็กต้องการ ในการควบคุมและรักษาระบบจัดแนวให้มีรัศมี 50 เมตรอย่างแม่นยำ
ระบบข้อต่อและการกลไกการบังคับเลี้ยว
ความสามารถของเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) ในการติดตามแนวโค้งนั้นขึ้นอยู่กับระบบการเชื่อมต่อแบบมีข้อต่อ (articulation system) เป็นหลัก เครื่องขุดอุโมงค์ขนาดเล็กสมัยใหม่ส่วนใหญ่ติดตั้งกระบอกสูบควบคุมทิศทาง (steering cylinders) ซึ่งใช้แรงดันไม่สมมาตรเพื่อเปลี่ยนทิศทางของหัวเจาะ (cutterhead) เทียบกับตัวเครื่องหลัก ในกรณีขุดในแนวตรง กระบอกสูบเหล่านี้จะใช้สำหรับการปรับแก้เส้นทางเล็กน้อยเท่านั้น แต่ในกรณีขุดตามแนวโค้ง กระบอกสูบเหล่านี้จำเป็นต้องทำงานอย่างต่อเนื่องและแม่นยำเพื่อรักษารัศมีที่ออกแบบไว้ตลอดความยาวของการขุดทั้งหมด
เครื่องขุดอุโมงค์ขนาดเล็กบางรุ่นมีการออกแบบแบบมีข้อต่อสองจุด (double-articulation design) ซึ่งให้จุดหมุนเพิ่มเติมหนึ่งจุด และขยายช่วงมุมการควบคุมทิศทาง (angular steering range) ได้ การจัดวางแบบนี้มีคุณค่าอย่างยิ่งสำหรับงานที่ต้องการรัศมีโค้งเล็กมาก (tight-radius applications) เนื่องจากช่วยลดแรงเครื่องกลที่กระทำต่อกระบอกสูบควบคุมทิศทาง และกระจายภาระเชิงเรขาคณิตไปยังข้อต่อแบบมีข้อต่อสองจุดแทนที่จะเป็นเพียงจุดเดียว สำหรับงานขุดที่มีรัศมี 50 เมตร เครื่องขุดแบบมีข้อต่อสองจุดมักให้ผลลัพธ์ที่เหนือกว่าเครื่องขุดแบบมีข้อต่อจุดเดียวทั้งในด้านความแม่นยำและความน่าเชื่อถือเชิงกล
ความเร็วในการตอบสนองของระบบไฮดรอลิกและความสามารถในการควบคุมแบบสัดส่วนของระบบพวงมาลัยก็มีความสำคัญเช่นกัน ภายใต้สภาพพื้นดินที่นุ่มหรือดินที่มีคุณสมบัติเปลี่ยนแปลงไปอย่างไม่สม่ำเสมอ เครื่องขุดอุโมงค์แบบไม่ขุดผิวดิน (microtunneling machine) อาจได้รับแรงด้านข้างที่ไม่คาดคิดซึ่งผลักให้เครื่องเบี่ยงเบนออกจากแนวที่กำหนดไว้ ระบบพวงมาลัยที่มีการตอบสนองของไฮดรอลิกอย่างรวดเร็วและสามารถควบคุมแบบสัดส่วนได้อย่างแม่นยำจะช่วยให้ผู้ปฏิบัติงานสามารถปรับแก้ตำแหน่งได้อย่างเล็กน้อยและต่อเนื่องโดยไม่เกิดการปรับมากเกินไป ซึ่งเป็นสิ่งสำคัญยิ่งต่อการรักษาเส้นทางโค้งที่เรียบลื่น แทนที่จะเกิดการเบี่ยงเบนแบบมุมหลายจุดที่เพียงแต่ใกล้เคียงกับส่วนโค้งที่ตั้งใจไว้ แต่ไม่ตรงกับส่วนโค้งนั้นอย่างแท้จริง
เส้นผ่านศูนย์กลางท่อ วัสดุที่ใช้ทำท่อ และผลกระทบต่อการนำทางผ่านเส้นโค้ง
วิธีที่เส้นผ่านศูนย์กลางท่อจำกัดรัศมีเส้นโค้งต่ำสุด
เส้นผ่านศูนย์กลางท่อเป็นหนึ่งในตัวแปรที่มีอิทธิพลมากที่สุดต่อการตัดสินใจว่าเครื่องขุดแบบไมโครทันเนลลิ่ง (microtunneling machine) จะสามารถสร้างเส้นโค้งที่มีรัศมี 50 เมตรได้หรือไม่ ยิ่งเส้นผ่านศูนย์กลางท่อมีขนาดใหญ่ขึ้น ความยาวของแต่ละชิ้นท่อมักจะเพิ่มขึ้นด้วย และเมื่อชิ้นท่อมีความยาวมากขึ้น ก็จะก่อให้เกิดการเบี่ยงเบนเชิงมุมที่ข้อต่อแต่ละจุดมากขึ้น เพื่อให้สามารถติดตามเส้นทางโค้งเดียวกันได้ ส่งผลให้การสร้างเส้นโค้งที่มีรัศมี 50 เมตรทำได้ง่ายกว่าด้วยท่อที่มีเส้นผ่านศูนย์กลางเล็กกว่า — โดยทั่วไปอยู่ในช่วง 300 มม. ถึง 600 มม. — เมื่อเทียบกับการติดตั้งท่อที่มีเส้นผ่านศูนย์กลางใหญ่กว่า 1000 มม.
สำหรับการใช้งานเครื่องขุดแบบไมโครทันเนลลิ่งที่มีเส้นผ่านศูนย์กลางใหญ่ ผู้รับเหมามักจำเป็นต้องลดความยาวของแต่ละชิ้นท่อลง เพื่อลดความต้องการเชิงมุมต่อข้อต่อแต่ละจุด การใช้ท่อที่มีความยาวสั้นลงในการดัน (jacking pipes) จะช่วยรักษาความสมบูรณ์เชิงเรขาคณิตของเส้นโค้งไว้ พร้อมทั้งป้องกันไม่ให้เกิดความเค้นสะสมมากเกินไปที่ข้อต่อท่อ การปรับเปลี่ยนนี้จำเป็นต้องระบุไว้ตั้งแต่ระยะการจัดซื้อ เนื่องจากผู้ผลิตท่อสำหรับการดันมาตรฐานมักจะจัดหาท่อที่มีความยาวจำกัดสำหรับการขับเคลื่อนตามเส้นทางโค้งได้ก็ต่อเมื่อมีการร้องขอเป็นพิเศษ
ความสัมพันธ์ระหว่างเส้นผ่านศูนย์กลางท่อและรัศมีของโค้งไม่ใช่ความสัมพันธ์เชิงเส้นอย่างง่าย แต่เกี่ยวข้องกับโมเมนต์ของความเฉื่อยของท่อ แรงดันสัมผัสระหว่างผิวนอกของท่อและพื้นดินรอบข้าง รวมทั้งผลสะสมของแรงดันขณะขับเคลื่อน (jacking forces) ตามระยะทางที่การขับเคลื่อนดำเนินไป วิศวกรด้านธรณีเทคนิคและโครงสร้างที่มีคุณสมบัติเหมาะสมควรตรวจสอบให้แน่ใจว่าเส้นผ่านศูนย์กลางท่อที่เลือกนั้นสามารถใช้งานร่วมกับรัศมี 50 เมตรได้ ก่อนที่เครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) จะถูกนำเข้าพื้นที่ก่อสร้าง
การเลือกวัสดุท่อสำหรับการขับเคลื่อนในโค้งที่มีรัศมีแคบ
ไม่ใช่วัสดุท่อทั้งหมดจะมีสมรรถนะเท่าเทียมกันเมื่อต้องรับแรงดัดและแรงเชิงมุมที่เกิดขึ้นระหว่างการขับเคลื่อนแบบไมโครทันเนลลิ่งตามแนวโค้ง ท่อคอนกรีตเสริมเหล็กสำหรับการดัน (reinforced concrete jacking pipes) ซึ่งนิยมใช้กันอย่างแพร่หลายในงานไมโครทันเนลลิ่งทั่วไป สามารถรองรับการขับเคลื่อนตามแนวโค้งได้หากมีการระบุรายละเอียดอย่างเหมาะสม รวมถึงการออกแบบข้อต่อที่เหมาะสม เช่น การใช้แผ่นรองกันกระแทก (cushion pads) และผิวปลายท่อที่ผ่านการกลึงเพื่อกระจายแรงเครียดอย่างสม่ำเสมอทั่วพื้นผิวสัมผัสของข้อต่อ อย่างไรก็ตาม ท่อคอนกรีตมีขีดจำกัดในการรับค่าการเบี่ยงเบนเชิงมุม (angular deflection tolerance) ซึ่งจำเป็นต้องคำนึงถึงอย่างเคร่งครัดในขั้นตอนการออกแบบเส้นทางโค้ง
ท่อเหล็ก ท่อกลассไฟเบอร์ และท่อคอนกรีตโพลิเมอร์ มีคุณสมบัติเชิงกลที่แตกต่างกัน ซึ่งอาจให้ข้อได้เปรียบในการใช้งานที่มีรัศมีโค้งแคบ ตัวอย่างเช่น ท่อเหล็กสามารถทนต่อการโก่งตัวที่ข้อต่อได้มากกว่า และให้ความต้านทานต่อแรงดัดแบบจุดได้สูงกว่า อย่างไรก็ตาม ท่อเหล็กยังนำมาซึ่งปัจจัยอื่นๆ ที่ต้องพิจารณา เช่น การป้องกันการกัดกร่อน ความต้องการการเชื่อม และการจัดการด้านโลจิสติกส์ในการขนย้ายและติดตั้งบนหน้างาน การเลือกวัสดุท่อควรดำเนินควบคู่ไปกับการเลือกการจัดวางโครงสร้างของเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) โดยถือว่าทั้งสองส่วนนี้เป็นระบบที่ผสานรวมกันทางวิศวกรรม
การออกแบบข้อต่อท่อมีความสำคัญไม่แพ้กัน สำหรับเครื่องขุดแบบไมโครทันเนลลิ่งที่ทำงานบนรัศมี 50 เมตร ข้อต่อท่อจะต้องให้ความยืดหยุ่นเชิงมุมเพียงพอ ขณะเดียวกันก็ต้องรักษาความแข็งแรงเชิงโครงสร้างที่เพียงพอเพื่อถ่ายโอนแรงดัน (jacking loads) อย่างมีประสิทธิภาพ โดยทั่วไปแล้ว จะระบุให้ใช้พื้นผิวข้อต่อแบบทรงกลมหรือแบบปลายแหลมเป็นพิเศษ ร่วมกับแผ่นรองชนแบบบีบอัดได้ เพื่อให้เกิดการเคลื่อนที่เชิงมุมตามที่ต้องการ โดยไม่ก่อให้เกิดจุดรวมความเค้น (stress concentrations) ซึ่งอาจทำให้ท่อแตกร้าวหรือทำลายความแน่นสนิทกันน้ำ
สภาวะของดินและพฤติกรรมของพื้นดินระหว่างการขุดโค้ง
อิทธิพลของประเภทดินต่อประสิทธิภาพการควบคุมทิศทาง
ลักษณะของชั้นดินที่เครื่องขุดอุโมงค์ขนาดเล็กเคลื่อนผ่านมีผลโดยตรงต่อความสามารถของเครื่องในการเลี้ยวตามเส้นโค้งที่แคบ สำหรับดินที่มีความเหนียว เช่น ดินเหนียว ดินจะให้การรองรับด้านข้างที่ค่อนข้างมั่นคงและมีพฤติกรรมที่สามารถทำนายได้ ซึ่งทำให้การรักษาแนวโค้งอย่างสม่ำเสมอง่ายขึ้น เครื่องขุดอุโมงค์ขนาดเล็กสามารถปรับการควบคุมทิศทางแบบค่อยเป็นค่อยไปโดยไม่ก่อให้เกิดการเคลื่อนตัวด้านข้างอย่างฉับพลัน ซึ่งเป็นสิ่งจำเป็นเพื่อให้บรรลุการขับเคลื่อนตามรัศมี 50 เมตรได้อย่างเรียบเนียนและแม่นยำ
ในดินที่มีลักษณะเป็นเม็ด เช่น ทรายหรือกรวด สถานการณ์จะซับซ้อนยิ่งขึ้น วัสดุเหล่านี้มีความสอดคล้องกันในแนวข้างน้อยกว่า หมายความว่าพื้นดินรอบเครื่องขุดอุโมงค์ขนาดเล็กอาจเคลื่อนตัวหรือเปลี่ยนตำแหน่งตอบสนองต่อแรงควบคุมทิศทางที่กระทำ ซึ่งก่อให้เกิดความเสี่ยงต่อการควบคุมทิศทางเกินขอบเขตหรือเกิดความเบี่ยงเบนจากแนวที่กำหนดไว้ หากผู้ปฏิบัติงานไม่จัดการอัตราการเจาะล่วงหน้าและคำสั่งควบคุมทิศทางอย่างแม่นยำ ในดินที่มีลักษณะเป็นเม็ดและมีน้ำไหลผ่าน การควบคุมแรงดันที่หน้าตัดการขุดจะมีความสำคัญยิ่งขึ้นไปอีก เพื่อป้องกันการสูญเสียดิน ซึ่งจะทำให้แนวการขุดไม่มั่นคงยิ่งขึ้น
สภาวะพื้นผิวแบบผสม — ซึ่งเครื่องขุดอุโมงค์จุลภาคต้องเผชิญกับชั้นดินหรือกระเปาะของดินที่มีประเภทต่างกันสลับกัน — ถือเป็นสถานการณ์ที่ท้าทายที่สุดสำหรับการขับเคลื่อนในแนวโค้ง การต้านทานที่แตกต่างกันทั่วแผ่นหน้าตัดอาจก่อให้เกิดแรงหมุนรอบแกนแนวราบ (yaw) หรือแรงหมุนรอบแกนแนวตั้ง (pitch) ที่ไม่ได้ตั้งใจ ซึ่งขัดแย้งกับทิศทางการควบคุมการเลี้ยวที่ตั้งใจไว้ โครงการที่ดำเนินการในสภาวะพื้นผิวแบบผสมควรรวมการสำรวจดินอย่างละเอียดก่อนเริ่มก่อสร้าง และเครื่องขุดอุโมงค์จุลภาคที่เลือกใช้ควรมีกำลังบิดเพียงพอและระบบควบคุมความดันหน้าตัดที่สามารถจัดการกับการเปลี่ยนผ่านเหล่านี้ได้โดยไม่สูญเสียการควบคุมการจัดแนว
การหล่อลื่นและการจัดการช่องว่างแหวนรอบท่อในแนวโค้ง
ในระหว่างการขับเคลื่อนแบบไมโครทันเนลลิ่งตามแนวโค้ง ท่อจะไม่เคลื่อนที่ตามเส้นทางที่มีความสมมาตรอย่างสมบูรณ์ภายในช่องว่างที่ขุดไว้รอบท่อ เรขาคณิตของแนวโค้งทำให้ท่อสัมผัสกับดินบริเวณส่วนโค้งด้านนอก ส่งผลให้เกิดแรงเสียดทานเพิ่มขึ้นบริเวณด้านนั้น หากไม่มีการจัดการสารหล่อลื่นอย่างเหมาะสม แรงเสียดทานที่ไม่สมดุลนี้อาจก่อให้เกิดแรงต้านต่อการควบคุมทิศทาง ซึ่งอาจเกินความสามารถในการปรับแก้ของเครื่องไมโครทันเนลลิ่ง จนทำให้แนวการขับเคลื่อนเบี่ยงเบนออกจากเส้นทางโค้งที่กำหนดไว้
การฉีดสารเลนตอไนต์ (bentonite slurry) ผ่านช่องฉีดสารหล่อลื่นที่ติดตั้งกระจายอยู่ตามแนวท่อที่ถูกดันเข้าไป เป็นวิธีมาตรฐานที่ใช้ลดแรงเสียดทานนี้ สำหรับการขับเคลื่อนตามแนวโค้ง แผนการหล่อลื่นจำเป็นต้องปรับให้สอดคล้องกับการกระจายแรงเสียดทานที่ไม่สมดุล โดยอัตราการฉีดสารหล่อลื่นด้านโค้งด้านนอกอาจต้องสูงกว่าด้านโค้งด้านใน เพื่อให้เกิดการหล่อลื่นอย่างสมดุล และป้องกันไม่ให้ท่อเคลื่อนตัวเข้าชนขอบเขตของดิน
การหล่อลื่นอย่างเหมาะสมไม่เพียงแต่ช่วยลดแรงที่ใช้ในการยก (jacking force) เท่านั้น แต่ยังช่วยป้องกันข้อต่อท่อจากภาระด้านข้างที่มากเกินไปซึ่งเกิดจากการสัมผัสพื้นดินแบบไม่สมมาตรอีกด้วย ผู้จัดการโครงการเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) ควรรวมโปรโตคอลการหล่อลื่นสำหรับการขับเคลื่อนตามแนวโค้งไว้ในเอกสารวิธีการดำเนินงาน (method statement) โดยระบุเป้าหมายปริมาตรการฉีดหล่อลื่น ขีดจำกัดความดัน และช่วงเวลาการตรวจสอบให้สอดคล้องกับความต้องการเฉพาะของแนวเส้นทางที่มีรัศมีโค้ง 50 เมตร แทนที่จะใช้แผนการหล่อลื่นสำหรับการขับเคลื่อนแบบตรงมาตรฐานโดยอัตโนมัติ
ข้อพิจารณาด้านการวางแผนและการดำเนินงานสำหรับการขับเคลื่อนตามแนวโค้งที่มีรัศมี 50 เมตร
ข้อกำหนดด้านวิศวกรรมก่อนการก่อสร้าง
การขับเคลื่อนแบบโค้งด้วยเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) ที่มีรัศมีโค้ง 50 เมตร ต้องอาศัยวิศวกรรมก่อนการก่อสร้างในระดับที่สูงกว่าการขับเคลื่อนแบบตรงปกติ ทีมงานโครงการจำเป็นต้องจัดทำแบบแปลนแนวเส้นทางอย่างละเอียด ซึ่งระบุรูปทรงเรขาคณิตของเส้นโค้งในพิกัดสามมิติ เพื่อให้ระบบนำทางสามารถเขียนโปรแกรมกำหนดตำแหน่งเป้าหมายที่แม่นยำได้ในช่วงระยะห่างที่สม่ำเสมอตลอดแนวเส้นทางการขับเคลื่อน แบบแปลนเหล่านี้ยังต้องยืนยันด้วยว่า ระบบท่อที่เลือกใช้นั้นสามารถติดตามแนวเส้นโค้งได้ตามเงื่อนไขเชิงเรขาคณิต โดยไม่เกินขีดจำกัดการเบี่ยงเบนของข้อต่อ
การคำนวณแรงยกสำหรับระบบขับเคลื่อนแบบโค้งจำเป็นต้องรวมแรงเสียดทานเพิ่มเติมและแรงต้านการเลี้ยวที่เกิดจากแนวโค้งด้วย สถานียกกลาง — ซึ่งบางครั้งเรียกว่าอินเทอร์แจ็ก (interjacks) — อาจจำเป็นต้องใช้เพื่อกระจายโหลดรวมของการยกไปยังชุดท่อทั้งหมด และป้องกันไม่ให้แรงสะสมเกินขีดจำกัดความสามารถในการรับน้ำหนักของท่อที่กำหนดไว้ จำนวนและตำแหน่งของการติดตั้งอินเทอร์แจ็กต้องออกแบบโดยพิจารณาจากเรขาคณิตของส่วนโค้งเฉพาะ ค่าสัมประสิทธิ์แรงเสียดทานของดิน และคุณสมบัติของวัสดุท่อที่เกี่ยวข้องกับโครงการนั้นๆ
เพลาเปิดตัวและเพลารับต้องจัดวางและก่อสร้างให้สามารถรองรับมุมเข้าและออกของเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) ตามแนวโค้งที่กำหนดไว้ หากเส้นโค้งเริ่มต้นทันทีหลังจากเปิดตัว เพลาต้องมีรูปทรงเรขาคณิตที่ช่วยให้เครื่องสามารถเริ่มการปรับทิศทางได้โดยไม่ถูกจำกัดด้วยผนังเพลาหรือซีลเข้า รายละเอียดการก่อสร้างเหล่านี้มักถูกมองข้ามในระยะวางแผนโครงการเบื้องต้น แต่อาจก่อให้เกิดความล่าช้าอย่างมากต่อตารางเวลาหากไม่ได้รับการแก้ไขก่อนการนำเครื่องมาติดตั้งจริง
การตรวจสอบการปฏิบัติงานและการปรับแก้แบบเรียลไทม์
ในระหว่างการขับเคลื่อนตามแนวโค้ง การตรวจสอบแบบเรียลไทม์ไม่ใช่สิ่งที่เลือกได้ — แต่เป็นข้อกำหนดพื้นฐานในการปฏิบัติงาน ผู้ควบคุมเครื่องขุดอุโมงค์แบบไมโคร (microtunneling machine) ต้องสามารถเข้าถึงข้อมูลตำแหน่งจากระบบนำทาง ค่าแรงดันจากการชุดโครงยึด (thrust frame) และสถานีแทรกกลาง (interjack stations) ตลอดจนข้อมูลความดันหน้าตัดจากเครื่องมือที่ติดตั้งบนหัวเจาะ (cutterhead instruments) ได้อย่างต่อเนื่อง ข้อมูลเหล่านี้ร่วมกันทำให้ผู้ควบคุมสามารถตรวจจับความเบี่ยงเบนของแนวการขุดได้ตั้งแต่ระยะแรก และดำเนินการปรับทิศทางการขุดอย่างทันท่วงที ก่อนที่ความเบี่ยงเบนจะสะสมเกินค่าความคลาดเคลื่อนที่ยอมรับได้
การจัดการอัตราการเจาะล่วงหน้าเป็นตัวแปรในการดำเนินงานที่มีความสำคัญอย่างยิ่งในการขับเคลื่อนในแนวโค้ง การเจาะล่วงหน้าเร็วเกินไปจะลดระยะเวลาที่มีให้ทำการปรับแก้การเลี้ยว และเพิ่มความเสี่ยงที่จะเกินขีดจำกัดการเบี่ยงเบนของข้อต่อที่จุดเชื่อมต่อท่อแต่ละจุด ในทางกลับกัน การเจาะล่วงหน้าช้าเกินไปอาจทำให้สารหล่อลื่นบริเวณช่องว่างรอบท่อไหลออกหรือตกตะกอน ส่งผลให้แรงเสียดทานเพิ่มขึ้นและทำให้การควบคุมทิศทางการเจาะยากขึ้น ผู้ปฏิบัติงานเครื่องขุดไมโครทันเนลที่มีประสบการณ์เข้าใจสมดุลนี้ดี และจะปรับอัตราการเจาะล่วงหน้าแบบไดนามิกตามข้อมูลย้อนกลับแบบเรียลไทม์ แทนที่จะยึดติดกับอัตราที่กำหนดไว้ล่วงหน้าในระยะวางแผนก่อนการก่อสร้าง
การสำรวจระบบท่อหลังการขับเคลื่อน (Post-drive as-built surveys) มีความสำคัญไม่แพ้กันในการยืนยันว่าระบบท่อที่ติดตั้งแล้วสอดคล้องกับแนวการวางท่อตามแบบแปลนที่กำหนดไว้ซึ่งมีรัศมีโค้ง 50 เมตร ภายในขอบเขตความคลาดเคลื่อนที่ระบุไว้ ความเบี่ยงเบนที่พบระหว่างการสำรวจระบบหลังการติดตั้งอาจจำเป็นต้องดำเนินการแก้ไข เช่น การฉีดวัสดุอัดแน่น (grouting) หรือการปรับแต่งข้อต่อ และยังให้บทเรียนอันมีค่าสำหรับการขับเคลื่อนในแนวโค้งในอนาคต การจัดทำเอกสารบันทึกการปฏิบัติงานทั้งหมดของการขับเคลื่อนเครื่องขุดแบบไมโครทันเนล (microtunneling machine drive) — รวมถึงคำสั่งควบคุมทิศทาง (steering inputs) แรงดันจากกระบอกสูบไฮดรอลิก (jacking forces) และค่าอ่านจากระบบนำทาง (guidance readings) — จะสร้างฐานความรู้ของโครงการ ซึ่งช่วยยกระดับความแม่นยำในการวางแผนสำหรับโครงการที่คล้ายคลึงกันในอนาคต
คำถามที่พบบ่อย
รัศมีโค้งที่แคบที่สุดที่เครื่องขุดแบบไมโครทันเนลสามารถทำได้โดยทั่วไปคือเท่าใด
รัศมีความโค้งต่ำสุดที่เครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) สามารถทำได้ขึ้นอยู่กับรุ่นของเครื่อง ขนาดเส้นผ่านศูนย์กลางท่อ รูปแบบการออกแบบข้อต่อหมุน (articulation design) และสภาพดิน หลายเครื่องสมัยใหม่ที่มีระบบควบคุมการเลี้ยวแบบข้อต่อหมุนสองชั้น (double-articulation steering systems) สามารถทำรัศมีความโค้งได้แคบถึง 30–50 เมตร ในสภาพพื้นดินที่เอื้ออำนวย โดยเฉพาะเมื่อใช้ท่อมีขนาดเส้นผ่านศูนย์กลางเล็ก สำหรับเครื่องมาตรฐานทั่วไปที่ไม่มีระบบข้อต่อหมุนพิเศษ มักจำกัดอยู่ที่รัศมีความโค้ง 100 เมตรขึ้นไป เสมอควรปรึกษาข้อมูลจำเพาะจากผู้ผลิตอุปกรณ์ และดำเนินการประเมินความเป็นไปได้เฉพาะโครงการก่อนตัดสินใจดำเนินการขับเจาะตามแผนเส้นทางที่มีรัศมีความโค้งแคบ
การโค้งด้วยรัศมี 50 เมตร จะทำให้แรงดันในการดัน (jacking force) ที่ต้องใช้เพิ่มขึ้นอย่างมีนัยสำคัญหรือไม่?
ใช่ ระบบขับเคลื่อนแบบโค้งโดยธรรมชาติจะสร้างแรงดันยก (jacking forces) ที่สูงกว่าระบบที่ขับเคลื่อนแบบตรงที่มีความยาวเท่ากัน เนื่องจากการกระจายแรงเสียดทานแบบไม่สมมาตรตามส่วนโค้งด้านนอก ร่วมกับแรงต้านการเลี้ยวจากดิน ทำให้ความต้องการแรงผลักรวมทั้งหมดที่ระบบดันของเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) เพิ่มขึ้น ขึ้นอยู่กับประเภทของดิน เส้นผ่านศูนย์กลางท่อ และประสิทธิภาพของการหล่อลื่น แรงดันยกในระบบขับเคลื่อนแบบโค้งอาจสูงกว่าระบบที่ขับเคลื่อนแบบตรงที่เปรียบเทียบได้ 20 ถึง 50 เปอร์เซ็นต์ ซึ่งจำเป็นต้องคำนึงถึงอย่างรอบคอบในการคำนวณแรงดันยกและการประเมินความสามารถเชิงโครงสร้างของท่อในระยะการออกแบบ
ระบบนำทางสามารถติดตามตำแหน่งของเครื่องขุดอุโมงค์ขนาดเล็กผ่านเส้นโค้งที่มีรัศมี 50 เมตรได้อย่างแม่นยำหรือไม่
ระบบนำทางแบบเลเซอร์มาตรฐานถูกออกแบบมาสำหรับการขับเคลื่อนในแนวตรง และไม่สามารถติดตามเครื่องขุดอุโมงค์ขนาดเล็ก (microtunneling machine) ผ่านโค้งที่มีรัศมีแคบได้อย่างแม่นยำ สำหรับการขับเคลื่อนผ่านโค้งที่มีรัศมี 50 เมตร จะต้องใช้ระบบนำทางแบบไจโรสโคปิก หรือระบบสถานีรวมอัตโนมัติ (automated total station systems) ซึ่งเทคโนโลยีเหล่านี้ให้ข้อมูลตำแหน่งสามมิติอย่างต่อเนื่อง ทำให้ผู้ปฏิบัติงานสามารถตรวจสอบการจัดแนวของเครื่องเทียบกับเส้นโค้งที่ออกแบบไว้แบบเรียลไทม์ได้ การเลือกระบบนำทางที่เหมาะสมเป็นหนึ่งในการตัดสินใจสำคัญที่สุดก่อนเริ่มก่อสร้างสำหรับโครงการขับเคลื่อนผ่านโค้งด้วยเทคนิคไมโครทันเนลลิ่งทุกโครงการ
การขับเคลื่อนด้วยเทคนิคไมโครทันเนลลิ่งที่มีรัศมีโค้ง 50 เมตร เหมาะสมกับทุกขนาดเส้นผ่านศูนย์กลางของท่อหรือไม่?
รัศมี 50 เมตรสามารถทำได้ง่ายขึ้นด้วยท่อที่มีเส้นผ่านศูนย์กลางเล็กกว่า โดยทั่วไปจะมีขนาดต่ำกว่า 800 มม. ซึ่งท่อแต่ละชิ้นที่สั้นลงและระบบข้อต่อที่มีความยืดหยุ่นมากขึ้นสามารถรองรับการเบี่ยงเบนเชิงมุมที่จำเป็นต่อแต่ละข้อต่อได้ สำหรับท่อขนาดใหญ่กว่า 1000 มม. การบรรลุรัศมี 50 เมตรจะยากขึ้นอย่างมาก และอาจจำเป็นต้องใช้ท่อที่มีความยาวสั้นเป็นพิเศษ ระบบข้อต่อที่ปรับเปลี่ยนแล้ว และเครื่องขุดอุโมงค์แบบไมโคร (microtunneling machine) ที่มีความสามารถในการควบคุมทิศทางเพิ่มขึ้น แต่ละการประยุกต์ใช้งานจะต้องประเมินแยกกันตามรูปทรงเรขาคณิตของท่อ ข้อกำหนดของข้อต่อ และความสามารถในการควบคุมทิศทางของเครื่องที่เลือกใช้
สารบัญ
- การเข้าใจความสามารถในการขุดในแนวโค้งของการขุดแบบไมโครทันเนลลิ่ง
- เส้นผ่านศูนย์กลางท่อ วัสดุที่ใช้ทำท่อ และผลกระทบต่อการนำทางผ่านเส้นโค้ง
- สภาวะของดินและพฤติกรรมของพื้นดินระหว่างการขุดโค้ง
- ข้อพิจารณาด้านการวางแผนและการดำเนินงานสำหรับการขับเคลื่อนตามแนวโค้งที่มีรัศมี 50 เมตร
-
คำถามที่พบบ่อย
- รัศมีโค้งที่แคบที่สุดที่เครื่องขุดแบบไมโครทันเนลสามารถทำได้โดยทั่วไปคือเท่าใด
- การโค้งด้วยรัศมี 50 เมตร จะทำให้แรงดันในการดัน (jacking force) ที่ต้องใช้เพิ่มขึ้นอย่างมีนัยสำคัญหรือไม่?
- ระบบนำทางสามารถติดตามตำแหน่งของเครื่องขุดอุโมงค์ขนาดเล็กผ่านเส้นโค้งที่มีรัศมี 50 เมตรได้อย่างแม่นยำหรือไม่
- การขับเคลื่อนด้วยเทคนิคไมโครทันเนลลิ่งที่มีรัศมีโค้ง 50 เมตร เหมาะสมกับทุกขนาดเส้นผ่านศูนย์กลางของท่อหรือไม่?