
 EN
EN
 AR
AR BG
BG HR
HR CS
CS FR
FR DE
DE EL
EL HI
HI IT
IT JA
JA KO
KO RO
RO RU
RU ES
ES TL
TL ID
ID LT
LT SK
SK SL
SL UK
UK VI
VI ET
ET TH
TH TR
TR FA
FA AF
AF MS
MS HY
HY AZ
AZ KA
KA BN
BN LO
LO LA
LA MN
MN NE
NE MY
MY KK
KK UZ
UZ KY
KY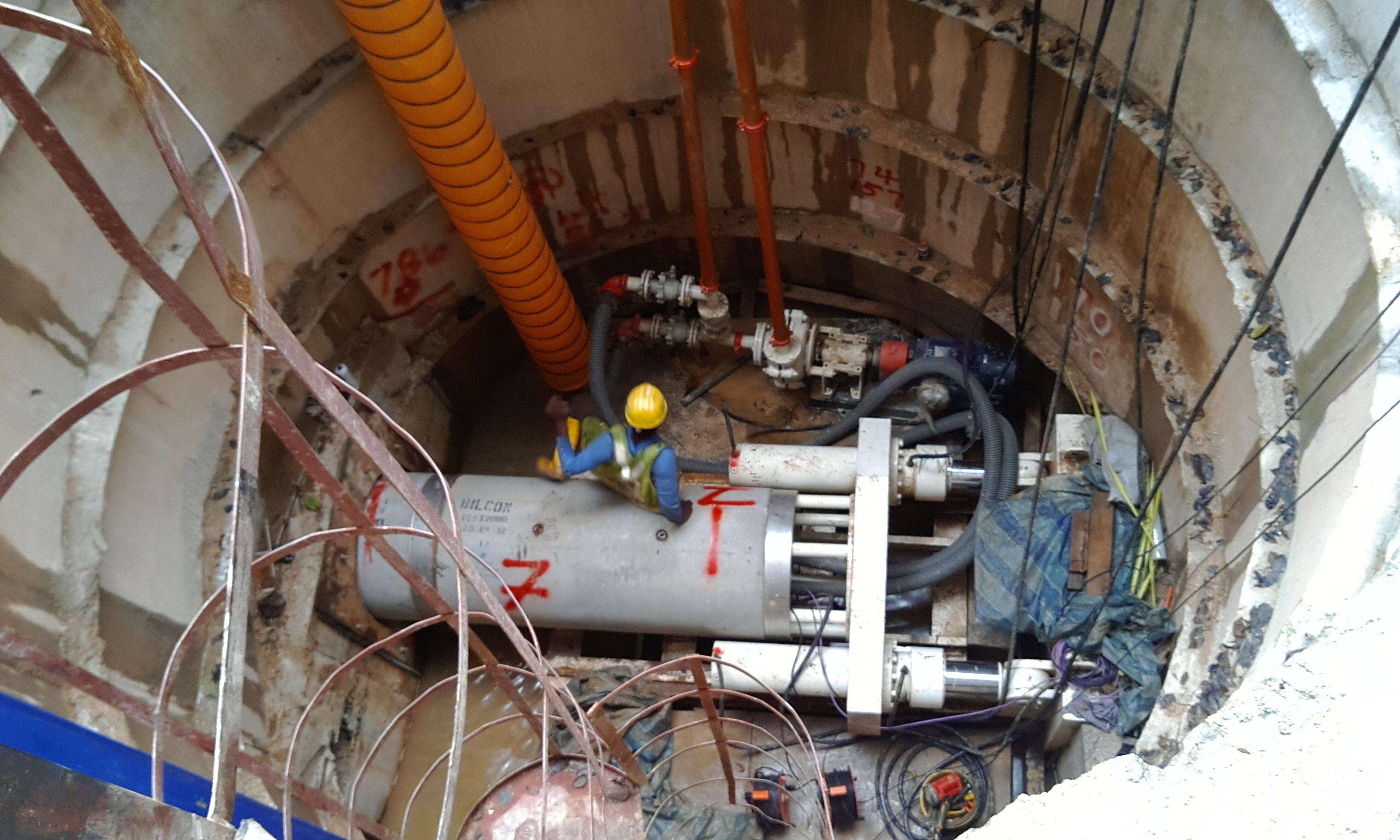
เมื่อโครงการโครงสร้างพื้นฐานในเขตเมืองต้องการติดตั้งท่อระบายน้ำ ท่อส่งสาธารณูปโภค หรือระบบระบายน้ำใต้ถนนที่มีการจราจรหนาแน่น อาคาร หรือพื้นที่ภูมิทัศน์ที่ละเอียดอ่อน การเลือกวิธีการขุดจึงมีความสำคัญอย่างยิ่ง ซึ่ง เครื่องเจาะอุโมงค์ขนาดเล็ก เครื่องขุดอุโมงค์ขนาดเล็ก (Micro Tunnel Boring Machine) ได้กลายเป็นวิธีแก้ปัญหาที่นิยมใช้มากที่สุด เนื่องจากสามารถดำเนินงานดังกล่าวได้โดยส่งผลกระทบต่อผิวดินด้านบนน้อยที่สุดเท่าที่จะเป็นไปได้ ต่างจากวิธีขุดแบบเปิด (Open-Cut Trenching) แบบดั้งเดิม ซึ่งต้องทำลายผิวถนนและก่อให้เกิดความไม่สะดวกต่อชีวิตประจำวันเป็นเวลาหลายสัปดาห์ แต่เทคโนโลยีนี้ขุดอุโมงค์ใต้ดินผ่านวงจรการขุดแบบปิดและควบคุมได้อย่างแม่นยำ โดยทิ้งผิวดินด้านบนไว้แทบไม่เปลี่ยนแปลง

การเข้าใจว่าเหตุใดเครื่องขุดอุโมงค์แบบไมโคร (micro tunnel boring machine) จึงก่อให้เกิดการรบกวนพื้นผิวดินน้อยมากนั้น จำเป็นต้องพิจารณาอย่างใกล้ชิดถึงหลักการออกแบบพื้นฐาน กลไกการขุด และเทคนิคการจัดการดินที่ใช้ตลอดกระบวนการขุดอุโมงค์ แต่ละองค์ประกอบเหล่านี้ทำงานร่วมกันในระบบแบบผสานอย่างแน่นหนา และเมื่อนำมารวมกันแล้วจะอธิบายได้ว่าเหตุใดอุปกรณ์ชนิดนี้จึงกลายเป็นสิ่งที่ขาดไม่ได้สำหรับงานก่อสร้างแบบไม่ขุดร่อง (trenchless construction) ในเขตเมืองที่มีความหนาแน่นสูง พื้นที่ที่มีความสำคัญทางนิเวศวิทยาเป็นพิเศษ และโครงการวิศวกรรมโยธาที่มีความซับซ้อนทางเทคนิคทั่วโลก
หลักวิศวกรรมพื้นฐานที่อยู่เบื้องหลังการปฏิบัติงานแบบไม่ขุดร่อง
การขุดแบบปิดหน้า (Closed-Face Excavation) และการรองรับดินอย่างต่อเนื่อง
ลักษณะสำคัญที่กำหนดความเป็นเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) คือ ระบบขุดแบบหน้าตัดปิด (closed-face excavation system) ซึ่งแตกต่างจากวิธีการขุดแบบเปิด (open excavation methods) ที่ทำให้ดินหรือหินปริมาณมากถูกเปิดออกสู่บรรยากาศโดยตรง หัวตัดของเครื่องขุดอุโมงค์ขนาดเล็กจะทำงานอยู่ภายในโล่ป้องกันที่ปิดสนิทอย่างสมบูรณ์ โล่ดังกล่าวทำหน้าที่แยกบริเวณที่ขุดออกจากพื้นดินรอบข้างอย่างชัดเจนตลอดเวลา จึงป้องกันไม่ให้ดินเคลื่อนตัวอย่างไม่ควบคุม ซึ่งหากเกิดขึ้นจะส่งผลให้เกิดการทรุดตัวหรือยกตัวของผิวดินบริเวณพื้นผิว
การสนับสนุนพื้นดินอย่างต่อเนื่องจะดำเนินไปตลอดทุกขั้นตอนของวงจรการขุดเจาะ เมื่อหัวขุดเคลื่อนที่ไปข้างหน้าและกำจัดวัสดุออก โล่ป้องกันจะให้การยึดโครงสร้างที่ทันทีทันใดต่อหน้าหลุมขุดเจาะ ซึ่งหมายความว่า ไม่มีช่วงเวลาใดในระหว่างการปฏิบัติงานที่จะมีช่องว่างที่ไม่ได้รับการรองรับเหลือไว้ด้านหลังหรือด้านหน้าเครื่องจักร ผลลัพธ์คือสภาพแวดล้อมการขุดที่มีเสถียรภาพทางกล โดยแรงกดจากพื้นดินจะถูกควบคุมมากกว่าปล่อยออกมา ซึ่งเป็นเหตุผลหลักที่ทำให้การรบกวนผิวดินมีน้อยมากตลอดระยะการขุดเจาะทั้งหมด
หลักการนี้มีความสำคัญอย่างยิ่งโดยเฉพาะเมื่อเครื่องขุดเจาะอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ทำงานในดินที่นุ่มหรือดินที่ไม่มีความเหนียว เช่น ทราย ดินโคลน และดินเหนียวที่อิ่มตัวด้วยน้ำ ซึ่งแม้แต่การลดแรงกดเพียงเล็กน้อยก็อาจก่อให้เกิดการสูญเสียดินอย่างรวดเร็ว การออกแบบหน้าขุดแบบปิด (closed-face design) ช่วยขจัดความเสี่ยงนี้อย่างเป็นระบบ ทำให้วิศวกรโครงการมีความมั่นใจในการขุดเจาะใต้โครงสร้างพื้นฐานที่สำคัญ โดยให้ผลลัพธ์ที่สามารถคาดการณ์ได้และควบคุมได้
สมดุลความดันของสารละลายขุด (Slurry Pressure Balance) และการชดเชยความดันของดิน (Earth Pressure Compensation)
ระบบเครื่องขุดอุโมงค์แบบไมโครทันเนลสมัยใหม่ส่วนใหญ่ใช้กลไกการทรงตัวด้วยความดันของสารละลาย (slurry pressure balance) หรือกลไกการทรงตัวด้วยความดันของดิน (earth pressure balance) เพื่อรักษาสมดุลที่หน้าตัดขุด ในโหมดการทำงานแบบสารละลาย (slurry-mode) จะมีการส่งผ่านสารละลายเบนโทไนต์ที่มีแรงดันไปยังหน้าตัดขุด ซึ่งทำหน้าที่รองรับแนวหน้าของการขุดพร้อมกันไปกับการลำเลียงเศษวัสดุที่ขุดได้กลับขึ้นสู่ผิวดินผ่านวงจรท่อปิด การทรงตัวแบบไฮดรอลิกนี้หมายความว่า ความดันตามธรรมชาติของชั้นดินจะไม่ถูกเกินค่าและไม่ถูกชดเชยต่ำกว่าค่าที่จำเป็น จึงสามารถกำจัดสาเหตุหลักสองประการที่ก่อให้เกิดการเคลื่อนตัวของผิวดิน ได้แก่ การขุดลึกเกินไป (over-excavation) และการพังทลายของหน้าตัดขุด (face collapse)
รูปแบบการสมดุลความดันของดินบรรลุผลลัพธ์ที่คล้ายคลึงกันโดยใช้วัสดุที่ขุดขึ้นมาเองเป็นตัวกลางรองรับหน้าตัดการขุด ซึ่งวัสดุดังกล่าวได้รับการปรับสภาพให้มีความสอดคล้องแบบกึ่งพลาสติก ระบบลำเลียงแบบสกรูควบคุมอัตราการนำวัสดุออก เพื่อให้แน่ใจว่าความดันที่หน้าตัดจะสอดคล้องอย่างแม่นยำกับสภาพของชั้นดินในสถานที่จริง ในทั้งสองกรณี เครื่องเจาะอุโมงค์ขนาดเล็ก (micro tunnel boring machine) จะรักษาโหมดความดันภายในที่สอดคล้องกับดินรอบข้าง จึงป้องกันไม่ให้เกิดการเปลี่ยนแปลงแรงเครียดสุทธิใดๆ ซึ่งอาจส่งผลกระทบต่อผิวดินด้านบน
ความสามารถในการจัดการความดันนี้ถือเป็นหนึ่งในแง่มุมที่ซับซ้อนทางเทคนิคมากที่สุดของการปฏิบัติงานเครื่องเจาะอุโมงค์ขนาดเล็ก และยังเป็นหนึ่งในเหตุผลสำคัญที่สุดที่ทำให้โครงการในเขตเมืองที่มีอาคารหนาแน่นสามารถดำเนินการต่อไปได้โดยไม่รบกวนการจราจร สาธารณูปโภค หรือรากฐานของอาคารที่ตั้งอยู่โดยตรงเหนือแนวอุโมงค์
การผสานระบบการดันท่อและการเชื่อมต่อเชิงโครงสร้าง
วิธีการติดตั้งท่อแบบแยกส่วนเพื่อป้องกันการเกิดโพรง
เครื่องขุดอุโมงค์ขนาดเล็ก (Micro Tunnel Boring Machine) ไม่ได้ทำหน้าที่เพียงแค่เจาะรูแล้วปล่อยให้รูนั้นเปิดโล่งเท่านั้น เทคโนโลยีนี้ถูกผสานรวมอย่างลึกซึ้งเข้ากับระบบการดันท่อ (Pipe Jacking System) ซึ่งติดตั้งส่วนประกอบท่อสำเร็จรูปโดยตรงไว้ด้านหลังหัวเจาะที่กำลังเคลื่อนที่ไปข้างหน้า เมื่อเครื่องขุดอุโมงค์ขนาดเล็กเคลื่อนที่ไปข้างหน้าเป็นระยะเท่ากับความยาวของท่อหนึ่งท่อน ท่อส่วนใหม่จะถูกดันเข้าสู่ตำแหน่งที่เหมาะสมจากช่องเปิดสำหรับเริ่มการขุด (Launch Shaft) และกลายเป็นส่วนหนึ่งของโครงสร้างบุผนังอุโมงค์อย่างต่อเนื่อง กระบวนการแบบต่อเนื่องนี้ทำให้ช่องว่างรูปแหวน (Annular Space) ที่เกิดขึ้นด้านหลังหัวเจาะถูกเติมเต็มทันทีด้วยท่อที่ติดตั้งแล้ว จึงไม่เหลือช่องว่างใดๆ ที่อาจยุบตัวลงหรือทำให้ดินเคลื่อนตัวได้
การเกิดช่องว่าง (Void) เป็นหนึ่งในกลไกที่ก่อให้เกิดความเสียหายรุนแรงที่สุดในการก่อสร้างใต้ดิน เมื่อช่องว่างที่ไม่มีการรองรับเกิดขึ้นและเคลื่อนตัวขึ้นผ่านคอลัมน์ดิน ผิวดินด้านบนอาจประสบปัญหาหลุมยุบ ภาวะการทรุดตัวแบบไม่สม่ำเสมอ หรือการทรุดตัวอย่างฉับพลัน วิธีการเจาะท่อแบบ Pipe Jacking ที่ใช้ร่วมกับเครื่องขุดอุโมงค์ขนาดเล็ก (Micro Tunnel Boring Machine) สามารถป้องกันปรากฏการณ์นี้ได้โดยธรรมชาติ เนื่องจากช่วยรับประกันความต่อเนื่องของโครงสร้างตั้งแต่หน้าตัดการขุดไปจนถึงช่องเปิดสำหรับเริ่มการขุด (Launch Shaft) ทุกขั้นตอนของการขุด
ผลลัพธ์ที่ได้จึงไม่เพียงแต่เป็นท่อระบายน้ำที่ติดตั้งเสร็จสมบูรณ์เท่านั้น แต่ยังเป็นโครงสร้างใต้ดินที่ติดตั้งอย่างไร้รอยต่อ ซึ่งได้แทนที่และรองรับดินรอบข้างตลอดความยาวทั้งหมดโดยไม่ก่อให้เกิดการรบกวนต่อสภาพผิวดินแต่อย่างใด ส่งผลให้เจ้าของโครงการเลือกกำหนดให้ใช้โซลูชันเครื่องขุดอุโมงค์ขนาดเล็ก (Micro Tunnel Boring Machine) เพิ่มมากขึ้น แม้ว่าการขุดแบบเปิด (Open-Cut Trenching) จะสามารถทำได้ทางเทคนิคก็ตาม เนื่องจากรูปแบบความเสี่ยงต่อการรบกวนผิวดินนั้นมีระดับต่ำลงอย่างมาก
การฉีดวัสดุอัดแน่นรอบท่อ (Annular Grouting) เพื่อกำจัดช่องว่างบริเวณด้านหลังท่อ (Tail Voids)
แม้จะมีการติดตั้งท่อทันที ก็ยังคงมีช่องว่างรูปแหวนเล็กๆ ระหว่างเส้นผ่านศูนย์กลางภายนอกของท่อที่ติดตั้งแล้วกับเส้นผ่านศูนย์กลางแนวคิดของหัวตัดอยู่เสมอ หากไม่มีการจัดการช่องว่างด้านท้ายนี้อย่างเหมาะสม ดินอาจเคลื่อนตัวเข้าสู่ช่องว่างดังกล่าวตามระยะเวลา ทำให้เกิดการทรุดตัวของผิวดินแบบล่าช้า ซึ่งอาจเกิดขึ้นได้หลายวันหรือหลายสัปดาห์หลังจากเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ได้เสร็จสิ้นการขุดแล้ว เพื่อแก้ไขปัญหานี้ จึงมีการฉีดสารกราวต์ผ่านช่องเปิดที่อยู่บนส่วนท้ายของท่อแต่ละปลอก เพื่อเติมเต็มช่องว่างรูปแหวนให้เต็มที่ขณะที่เครื่องกำลังเคลื่อนตัวไปข้างหน้า
กระบวนการฉีดวัสดุอัดแน่น (grouting) ควบคุมอย่างระมัดระวังทั้งในแง่ความดันขณะฉีดและปริมาตรที่ใช้ เพื่อให้แน่ใจว่าช่องว่างทั้งหมดถูกเติมเต็มอย่างสมบูรณ์ โดยไม่ก่อให้เกิดความดันส่วนเกินซึ่งอาจทำให้พื้นดินรอบข้างแตกร้าว หรือทำให้ผิวดินยกตัวขึ้น (heave) ที่ผิวดิน เมื่อดำเนินขั้นตอนนี้อย่างถูกต้อง ท่อที่ติดตั้งแล้วจะยึดพื้นดินไว้ในตำแหน่งเดิมอย่างมีประสิทธิภาพ และเครื่องขุดเจาะอุโมงค์ขนาดเล็ก (micro tunnel boring machine) จะทิ้งไว้เบื้องหลังไม่เพียงแต่ท่อเท่านั้น แต่ยังเป็นทางเดินใต้ดินที่ถูกอัดแน่นอย่างสมบูรณ์และมีความแข็งแรงเชิงโครงสร้างครบถ้วน ซึ่งไม่จำเป็นต้องดำเนินการรักษาสภาพพื้นดินเพิ่มเติมอีก
การผสมผสานระหว่างการติดตั้งท่อทันทีและการอัดวัสดุอัดแน่นรอบท่อ (annular grouting) นี้ เป็นลักษณะเฉพาะที่โดดเด่นของวิธีการใช้เครื่องขุดเจาะอุโมงค์ขนาดเล็ก (micro tunnel boring machine) และเป็นเหตุผลที่การตรวจสอบการทรุดตัวของผิวดินหลังการก่อสร้างในโครงการเหล่านี้ มักบันทึกค่าการทรุดตัวเป็นมิลลิเมตร แทนที่จะเป็นเซนติเมตร แม้ในบริเวณพื้นดินอ่อนที่อยู่โดยตรงใต้โครงสร้างที่มีความอ่อนไหวเป็นพิเศษ
พื้นที่ใช้สอยบนผิวดินน้อยที่สุด
การออกแบบหอเริ่มต้น (Launch Shaft) และหอสิ้นสุด (Reception Shaft)
หนึ่งในความแตกต่างที่มองเห็นได้ชัดเจนที่สุดระหว่างโครงการใช้เครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) กับการขุดแบบเปิด (open-cut excavation) คือพื้นที่ผิวดินที่ต้องใช้ สำหรับการขุดร่องแบบเปิดนั้นจำเป็นต้องมีร่องเปิดอย่างต่อเนื่องตลอดแนวเส้นทางท่อซึ่งอาจยาวหลายร้อยหรือหลายพันเมตรผ่านสภาพแวดล้อมในเขตเมือง ในขณะที่เครื่องขุดอุโมงค์ขนาดเล็กนั้นต้องการเพียงการขุดหลุมแนวตั้งเฉพาะจุดสองแห่งเท่านั้น คือ หลุมปล่อย (launch shaft) ซึ่งเครื่องจะเริ่มเข้าสู่พื้นดิน และหลุมรับ (reception shaft) ซึ่งเครื่องจะถูกนำขึ้นมาเมื่อสิ้นสุดการขุด
เพลาเหล่านี้มักมีพื้นที่หน้าตัดเล็ก และออกแบบโดยใช้เสาเข็มแบบเซแคนต์ (secant piles) เสาเข็มแผ่น (sheet piling) หรือแหวนคอนกรีตแบบแยกส่วน (segmental concrete rings) เพื่อให้เกิดผลกระทบต่อพื้นดินบริเวณรอบข้างน้อยที่สุด หลังจากกระบวนการขุดเจาะเสร็จสิ้นแล้ว เพลาจะถูกถมกลับด้วยวัสดุและผิวหน้าดินจะถูกบูรณะคืนสภาพ ทำให้เหลือเพียงรอยรบกวนที่เล็กน้อยและจำกัดอยู่ในพื้นที่เฉพาะ แทนที่จะเป็นรอยแผลยาวต่อเนื่องที่ลากผ่านโครงสร้างเมือง ลักษณะนี้ทำให้เครื่องขุดอุโมงค์ขนาดจิ๋ว (micro tunnel boring machine) มีความสำคัญอย่างยิ่งในสถานการณ์ที่การเข้าถึงพื้นผิวดินมีข้อจำกัด จำเป็นต้องลดการปิดถนนให้น้อยที่สุด หรือเจ้าของทรัพย์สินไม่สามารถยอมรับกิจกรรมก่อสร้างที่ดำเนินไปเป็นเวลานานตามแนวทางเดินท่อได้
ความกะทัดรัดของโครงสร้างพื้นฐานสนับสนุนที่อยู่เหนือพื้นดิน ซึ่งรวมถึงโรงงานบำบัดสิ่งปฏิกูล พื้นที่จัดเก็บท่อ และอุปกรณ์ขับเคลื่อนแบบเจาะ (jacking equipment) ยังช่วยลดผลกระทบต่อผิวดินในโครงการเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ได้อีกด้วย ทีมงานโครงการที่มีประสบการณ์สามารถจัดวางสิ่งอำนวยความสะดวกสนับสนุนเหล่านี้ให้เข้ากับพื้นที่ก่อสร้างที่มีข้อจำกัดอย่างไม่น่าเชื่อ ซึ่งยิ่งช่วยลดผลกระทบเชิงภาพและทางกายภาพต่อพื้นที่โดยรอบให้น้อยลงอีก
เทคโนโลยีการควบคุมระยะไกลและการนำทาง
เครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ถูกควบคุมทั้งหมดจากระดับพื้นดินผ่านระบบควบคุมระยะไกลและระบบตรวจสอบ ผู้ปฏิบัติงานเครื่องจักรไม่จำเป็นต้องเข้าไปในอุโมงค์ระหว่างการขับเคลื่อน จึงไม่จำเป็นต้องมีโครงสร้างพื้นฐานสำหรับการเข้าถึงของคน ช่องระบายอากาศ และเส้นผ่านศูนย์กลางของอุโมงค์ที่ใหญ่กว่าซึ่งระบบที่ใช้คนขับต้องการ เส้นผ่านศูนย์กลางของอุโมงค์ที่เล็กลงหมายถึงปริมาณวัสดุที่ต้องขุดออกน้อยลง แรงขับเคลื่อน (jacking forces) ต่ำลง และการรบกวนมวลดินรอบๆ อุโมงค์น้อยลง ซึ่งทั้งหมดนี้ส่งผลโดยตรงให้เกิดผลกระทบต่อผิวดินน้อยลง
ระบบนำทางแบบเทโอดอไลต์เลเซอร์ติดตามตำแหน่งและแนวการจัดเรียงของหัวเครื่องขุดอุโมงค์ขนาดเล็กอย่างต่อเนื่องด้วยความแม่นยำระดับมิลลิเมตร และส่งข้อมูลตำแหน่งแบบเรียลไทม์ไปยังผู้ควบคุมพื้นผิว การปรับทิศทางจะทำโดยการปรับแรงผลักที่แตกต่างกันบนหัวตัดที่สามารถขยับได้ ซึ่งช่วยให้เครื่องสามารถเคลื่อนที่ตามแนวที่ออกแบบไว้ได้อย่างแม่นยำเป็นพิเศษ ความแม่นยำนี้ช่วยลดความเสี่ยงของการเบี่ยงเบนที่ไม่ได้วางแผนไว้ ซึ่งอาจทำให้เครื่องเข้าใกล้โครงสร้างหรือสาธารณูปโภคที่ละเอียดอ่อนเกินกว่าที่คาดการณ์ไว้ และช่วยให้มั่นใจว่าขอบเขตของการรบกวนพื้นดินจะยังคงอยู่ภายในค่าความคลาดเคลื่อนที่คาดการณ์ไว้ตลอดระยะเวลาการขุด
การผสมผสานระหว่างการควบคุมจากระยะไกลกับระบบนำทางที่แม่นยำ ทำให้เครื่องขุดอุโมงค์ขนาดเล็กกลายเป็นเครื่องมือก่อสร้างที่ควบคุมได้อย่างโดดเด่น โดยการตัดสินใจของมนุษย์กับความสามารถของเครื่องจักรผสานรวมกันอย่างไร้รอยต่อ เพื่อให้บรรลุผลลัพธ์ที่ก่อให้เกิดการรบกวนน้อยอย่างสม่ำเสมอ ไม่ว่าจะเป็นสภาพดินหรือความซับซ้อนของโครงสร้างพื้นฐานรอบข้าง
ความสามารถในการปรับตัวตามสภาพพื้นผิวและการป้องกันการรบกวน
ประสิทธิภาพในการขุดในสภาพหิน
แม้ว่าการอภิปรายเกี่ยวกับเทคโนโลยีเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) มักเน้นไปที่การใช้งานในดินอ่อน แต่เครื่องจักรเหล่านี้ก็มีประสิทธิภาพไม่แพ้กันในการขุดในสภาพหินแข็ง โดยหัวเจาะแบบหมุนเต็มหน้า (full-face rotary cutter head) ที่ติดตั้งใบมีดแบบจาน (disc cutters) จะทำปฏิกิริยากับมวลหินอย่างควบคุมได้และเป็นไปอย่างค่อยเป็นค่อยไป ในสภาพหิน กลไกหลักที่ก่อให้เกิดการรบกวนคือการสั่นสะเทือนที่ถ่ายทอดจากกระบวนการตัดเข้าสู่ชั้นหินโดยรอบ เครื่องขุดอุโมงค์ขนาดเล็กที่ออกแบบมาอย่างดีจะจัดการปัญหานี้ผ่านการปรับความเร็วในการหมุนของหัวเจาะให้เหมาะสม การปรับแรงดันผลัก (thrust force) อย่างแม่นยำ และการเลือกใช้เครื่องมือตัดที่สอดคล้องกับคุณสมบัติของหินอย่างตรงจุด ทั้งในแง่ความแข็งแรงในการรับแรงอัดแบบไม่มีการกั้น (unconfined compressive strength) และระดับความกัดกร่อน (abrasivity)
เนื่องจากเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ตัดหินด้วยวิธีการกลไก แทนที่จะใช้วิธีระเบิด ทำให้ขอบเขตของการรบกวนพื้นดินจำกัดอยู่เฉพาะบริเวณใกล้เคียงกับหัวตัดเท่านั้น ไม่มีคลื่นกระแทกใดๆ แพร่กระจายผ่านมวลหินเพื่อรบกวนรากฐานด้านบนหรืออุปกรณ์ที่ไวต่อการสั่นสะเทือน ซึ่งทำให้เครื่องขุดอุโมงค์ขนาดเล็กเป็นวิธีที่ได้รับความนิยมมากที่สุดสำหรับการขุดอุโมงค์ใต้โรงพยาบาล ศูนย์ข้อมูล อาคารประวัติศาสตร์ และสิ่งอำนวยความสะดวกอื่นๆ ที่วิศวกรโครงสร้างหรือผู้จัดการสิ่งอำนวยความสะดวกกำหนดข้อจำกัดเรื่องการสั่นสะเทือนอย่างเข้มงวด
ในสภาวะที่หน้าตัดมีทั้งดินและหินปะปนกัน (mixed-face conditions) ซึ่งหัวเจาะต้องสัมผัสกับทั้งดินและหินพร้อมกัน เครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ที่ออกแบบแบบปิดหน้าตัด (closed-face design) จะช่วยป้องกันการกัดเซาะแบบไม่สม่ำเสมอของวัสดุที่นุ่มกว่า ในขณะที่กำลังทำการตัดวัสดุที่แข็งกว่า ซึ่งเป็นสาเหตุทั่วไปของการทรุดตัวอย่างฉับพลันของผิวดินบริเวณพื้นผิวในอุโมงค์เมืองที่อยู่ลึกเพียงเล็กน้อย ความยืดหยุ่นในการทำงานภายใต้สภาวะทางธรณีวิทยาที่หลากหลายนี้ คือเหตุผลสำคัญที่ทำให้เครื่องขุดอุโมงค์ขนาดเล็กกลายเป็นเทคโนโลยีที่ได้รับการนำไปใช้อย่างแพร่หลายในเขตเมืองที่มีลักษณะทางธรณีวิทยาแตกต่างกันมาก
ระบบหล่อลื่นและการลดแรงเสียดทาน
เมื่อความยาวของท่อเพิ่มขึ้นและแรงดันในการเจาะ (jacking forces) เพิ่มสูงขึ้น แรงเสียดทานระหว่างผิวด้านนอกของชุดท่อที่ติดตั้งแล้วกับพื้นดินรอบข้างจะเพิ่มขึ้นตามสัดส่วน หากรายการแรงเสียดทานนี้ไม่ได้รับการควบคุมอย่างเหมาะสม อาจทำให้ชุดท่อเกิดการเบี่ยงเบน สร้างแรงด้านข้าง (lateral loads) ลงบนพื้นดินรอบข้าง หรือก่อให้เกิดความเครียดสูงพอที่จะรบกวนโครงสร้างของดินเหนือแนวเส้นทางอุโมงค์ได้ การติดตั้งเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) จะใช้การฉีดสารหล่อลื่นเบนโทไนต์ (bentonite lubrication) ที่จุดต่าง ๆ หลายจุดตลอดความยาวของชุดท่อ เพื่อลดแรงเสียดทานผิว (skin friction) ให้อยู่ในระดับที่สามารถควบคุมได้ตลอดระยะการขุด
การหล่อลื่นนี้ไม่เพียงแต่ช่วยลดแรงยก (jacking loads) เท่านั้น แต่ยังสร้างฟิล์มแหวนบางๆ ที่มีความดันรอบท่อ ซึ่งทำหน้าที่เป็นแผ่นกันชนเพิ่มเติมระหว่างท่อที่ติดตั้งแล้วกับพื้นดินโดยรอบ ฟิล์มนี้ป้องกันไม่ให้ท่อมีการสัมผัสโดยตรงกับพื้นดิน ซึ่งอาจก่อให้เกิดความเข้มข้นของแรงเครียดในบริเวณท้องถิ่น และรักษาความสมบูรณ์เชิงโครงสร้างของแนวท่อที่เจาะไว้ตลอดกระบวนการยก (jacking operation) ผลลัพธ์คือการขับเคลื่อนที่ราบรื่นและควบคุมได้ดีขึ้น ซึ่งช่วยลดการรบกวนพื้นดินบริเวณรองลงมาที่เกิดจากการเคลื่อนตัวของดินอันเนื่องมาจากการเสียดทาน
การใช้สถานียกกลาง (intermediate jacking stations) ในการขับเคลื่อนระยะไกลยิ่งขึ้น ยังช่วยกระจายแรงยกไปตามความยาวของท่ออย่างทั่วถึง และป้องกันไม่ให้เกิดการสะสมของแรงมากเกินไปที่จุดใดจุดหนึ่งในชุดท่อ จึงลดความเสี่ยงของการโก่งตัวของท่อหรือการรบกวนพื้นดินที่เกิดจากแรงโหลดเกินท้องถิ่น ทุกมาตรการเหล่านี้สะท้อนแนวทางเชิงระบบและผ่านการออกแบบทางวิศวกรรมอย่างรอบคอบเพื่อป้องกันการรบกวน ซึ่งเป็นลักษณะเฉพาะของวิธีการขุดอุโมงค์ขนาดเล็กด้วยเครื่องขุดอุโมงค์แบบไมโคร (micro tunnel boring machine methodology)
การเปรียบเทียบกับวิธีการติดตั้งทางเลือกอื่น
เหตุใดการขุดร่องแบบเปิดจึงก่อให้เกิดความรบกวนต่อบนผิวดินอย่างมาก
เพื่อให้เข้าใจอย่างลึกซึ้งว่าเหตุใดเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) จึงก่อให้เกิดความรบกวนต่อบนผิวดินน้อยมาก จำเป็นต้องเข้าใจก่อนว่าการขุดร่องแบบเปิดแบบดั้งเดิม (conventional open-cut trenching) นั้นประกอบด้วยขั้นตอนใดบ้าง และเหตุใดระดับความรบกวนที่เกิดขึ้นจึงสูงกว่ามาก การขุดร่องแบบเปิดนั้นต้องถอดพื้นผิวถนนหรือชั้นคลุมพื้นดินออกทั้งหมด ขุดร่องลงไปจนถึงความลึกที่กำหนดสำหรับวางท่อ ติดตั้งท่อ ถมกลับด้วยวัสดุเม็ดที่คัดเลือกไว้ บดอัดให้แน่น และฟื้นฟูผิวดินให้กลับสู่สภาพเดิม ทุกขั้นตอนเหล่านี้ล้วนก่อให้เกิดความรบกวนที่มองเห็นได้และยาวนานต่อสภาพแวดล้อมบนผิวดิน
นอกเหนือจากความไม่สะดวกทางกายภาพในทันทีแล้ว การขุดร่องแบบเปิด (open-cut trenching) ยังก่อให้เกิดความเสี่ยงต่อการทรุดตัวในระยะยาวอันเนื่องมาจากการบดอัดวัสดุถมกลับไม่เพียงพอ ซึ่งอาจทำให้เกิดแอ่งบนผิวจราจรขึ้นภายในระยะเวลาหลายเดือนหรือหลายปีหลังจากงานก่อสร้างแล้วเสร็จ กระบวนการบูรณะผิวถนนมักจะไม่แข็งแรงเท่ากับผิวจราจรเดิม และความล้มเหลวของร่องสำหรับวางสาธารณูปโภคถือเป็นหนึ่งในสาเหตุที่พบบ่อยที่สุดของการเสื่อมสภาพผิวถนนในเขตเมือง กลไกการทรุดตัวหลังการก่อสร้างทั้งหมดที่กล่าวมานี้ไม่เกิดขึ้นกับท่อที่ติดตั้งโดยใช้เครื่องเจาะอุโมงค์ขนาดเล็ก (micro tunnel boring machine) เนื่องจากไม่มีวัสดุผิวดินใดๆ ถูกกระทบกระเทือนตามแนวเส้นทางที่วางท่อ
ค่าใช้จ่ายด้านสังคมและเศรษฐกิจที่เกิดจากการขุดแบบเปิด เช่น ความล่าช้าของการจราจร การสูญเสียรายได้ของธุรกิจ อุปสรรคต่อการให้บริการฉุกเฉิน และความเครียดของชุมชน ก็จะถูกหลีกเลี่ยงได้โดยสิ้นเชิงเมื่อใช้เครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ค่าใช้จ่ายทางอ้อมเหล่านี้กำลังได้รับการประเมินมูลค่าอย่างเป็นระบบมากขึ้นโดยหน่วยงานท้องถิ่น และนำมาพิจารณาประกอบการตัดสินใจเลือกโครงการ ซึ่งยิ่งเสริมสร้างเหตุผลเชิงธุรกิจให้กับโซลูชันเครื่องขุดอุโมงค์ขนาดเล็กในโครงการปรับปรุงโครงสร้างพื้นฐานในเขตเมือง
ข้อได้เปรียบเหนือวิธีการขุดแบบไม่ขุดร่องอื่นๆ
เครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ไม่ใช่วิธีการติดตั้งแบบไม่ขุดร่อง (trenchless installation method) เพียงวิธีเดียวที่มีอยู่ แต่ก็ให้ข้อได้เปรียบเฉพาะตัวเมื่อเปรียบเทียบกับทางเลือกอื่น เช่น การเจาะทิศทางแนวนอน (horizontal directional drilling) และการดันท่อเข้าไปในดิน (pipe ramming) ซึ่งข้อได้เปรียบเหล่านี้เกี่ยวข้องโดยตรงกับการควบคุมการรบกวนพื้นผิวดิน แม้ว่าการเจาะทิศทางแนวนอนจะมีประสิทธิภาพสำหรับการข้ามสิ่งอำนวยความสะดวกบางประเภท แต่ก็อาจก่อให้เกิดการรบกวนชั้นดินอย่างรุนแรงผ่านปรากฏการณ์ที่เรียกว่า 'การไหลย้อนกลับโดยไม่ตั้งใจ' (inadvertent returns) ซึ่งเป็นกรณีที่สารหล่อลื่นในการเจาะรั่วไหลขึ้นสู่พื้นผิวดินภายใต้แรงดัน ความเสี่ยงนี้มีความรุนแรงเป็นพิเศษในดินที่ไม่มีความเหนียว (cohesionless soils) และอาจส่งผลให้เกิดมลพิษบนพื้นผิวดินและทำให้พื้นดินยกตัวขึ้นอย่างไม่คาดคิด
การขับท่อแบบปั๊ม (Pipe ramming) ซึ่งใช้แรงกระแทกเพื่อดันปลอกเหล็กผ่านชั้นดิน สร้างการสั่นสะเทือนและการเคลื่อนตัวของพื้นดิน ซึ่งอาจรบกวนสาธารณูปโภคที่ไวต่อการรบกวน โครงสร้าง และผิวดินบริเวณใกล้เคียง นอกจากนี้ยังขาดความแม่นยำในการควบคุมทิศทางเมื่อเปรียบเทียบกับเครื่องขุดอุโมงค์จุลภาค (micro tunnel boring machine) ทำให้ไม่เหมาะสมสำหรับงานที่ต้องการแนวการวางที่แน่นอนมาก หรืองานติดตั้งที่ต้องรักษาระดับความคลาดเคลื่อนของตำแหน่งให้อยู่ภายในมิลลิเมตร ในทางกลับกัน เครื่องขุดอุโมงค์จุลภาคมีการออกแบบแบบหน้าตัดปิด (closed-face) ที่ควบคุมสมดุลความดันและสามารถควบคุมทิศทางได้ จึงหลีกเลี่ยงกลไกการรบกวนทั้งสองแบบนี้ได้ จึงมักถูกกำหนดให้ใช้ในงานขุดอุโมงค์แบบไม่ขุดผิวดิน (trenchless) ที่ท้าทายที่สุด โดยเฉพาะเมื่อความทนทานต่อการรบกวนผิวดินต้องเป็นศูนย์อย่างมีประสิทธิภาพ
สำหรับโครงการที่ต้องการการควบคุมแนวการวางอย่างแม่นยำ การจัดการพฤติกรรมของดินอย่างคาดการณ์ได้ และการรับประกันผลกระทบต่อผิวดินในระดับต่ำสุดภายใต้เงื่อนไขของดินที่หลากหลาย เครื่องขุดอุโมงค์จุลภาคจึงถือเป็นวิธีแก้ปัญหาเชิงเทคนิคที่น่าเชื่อถือที่สุดในปัจจุบัน สำหรับอุตสาหกรรมการก่อสร้างแบบไม่ขุดผิวดิน (trenchless construction)
คำถามที่พบบ่อย
เครื่องขุดอุโมงค์แบบไมโครต้องอยู่ลึกลงไปเท่าใดจึงจะหลีกเลี่ยงการรบกวนผิวดิน?
แม้ว่าเครื่องขุดอุโมงค์แบบไมโครจะสามารถทำงานที่ความลึกค่อนข้างตื้นได้ แต่ความเสี่ยงในการรบกวนผิวดินจะลดลงเมื่อความลึกของชั้นดินเหนืออุโมงค์ (cover depth) เพิ่มขึ้น ในดินอ่อน ทั่วไปแล้วแนะนำให้มีความลึกของชั้นดินเหนืออุโมงค์อย่างน้อย 1.5 ถึง 2.0 เท่าของเส้นผ่านศูนย์กลางอุโมงค์ เพื่อรักษาผลการโค้งตัวของดิน (arching effect) ที่เพียงพอเหนือหัวตัด (cutter head) ส่วนในสภาพดินที่แข็งกว่า สามารถยอมรับความลึกของชั้นดินเหนืออุโมงค์ที่ตื้นกว่าได้ วิศวกรด้านธรณีเทคนิคที่มีประสบการณ์จะประเมินเงื่อนไขเฉพาะของพื้นที่ และใช้แบบจำลองทำนายการทรุดตัว (settlement prediction models) เพื่อยืนยันความลึกของชั้นดินเหนืออุโมงค์ที่ยอมรับได้ ก่อนเริ่มการขุดด้วยเครื่องขุดอุโมงค์แบบไมโครแต่ละครั้ง
เครื่องขุดอุโมงค์แบบไมโครสามารถทำงานโดยตรงใต้อาคารหรือรากฐานที่มีอยู่แล้วได้หรือไม่?
ใช่ สามารถออกแบบและควบคุมเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ให้ผ่านใต้รากฐานที่มีอยู่แล้วได้โดยตรง ทั้งนี้ต้องอาศัยการประเมินสภาพดินอย่างรอบคอบ การควบคุมแรงดันหน้าตัดอย่างเหมาะสม และการออกแบบแนวเส้นทางให้มีระยะห่างเพียงพอจากองค์ประกอบโครงสร้าง งานสำรวจก่อนเริ่มก่อสร้างและการตรวจสอบการทรุดตัวแบบเรียลไทม์เป็นแนวทางปฏิบัติมาตรฐานสำหรับโครงการประเภทนี้ ทั้งนี้การออกแบบเครื่องขุดอุโมงค์ขนาดเล็กแบบปิดหน้าตัดและสมดุลแรงดันทำให้เป็นหนึ่งในวิธีที่ปลอดภัยที่สุดสำหรับการขุดใต้โครงสร้างที่ไวต่อการรบกวน
การตรวจสอบใดบ้างที่ใช้ยืนยันว่าการขุดด้วยเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ไม่ก่อให้เกิดการเคลื่อนตัวของพื้นผิวดิน
การจัดวางเครื่องวัดการทรุดตัวของผิวหน้าพื้นดิน ซึ่งประกอบด้วยจุดวัดระดับความสูงที่มีความแม่นยำสูง ติดตั้งไว้บนผิวจราจร โครงสร้าง และกล่องอุปกรณ์สาธารณูปโภค จะได้รับการตรวจสอบก่อน ระหว่าง และหลังการขับเคลื่อนเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) โดยสถานีรวมอัตโนมัติ (automated total stations) และเครื่องวัดการเคลื่อนตัวของพื้นดินสามารถให้ข้อมูลแบบเรียลไทม์แก่วิศวกรประจำไซต์ได้ ระดับที่กำหนดเป็นการแจ้งเตือนล่วงหน้า (trigger levels) จะได้รับการตกลงร่วมกันล่วงหน้ากับลูกค้าและภาคส่วนที่เกี่ยวข้อง และหากผลการวัดเข้าใกล้ค่าเกณฑ์เหล่านี้ ค่าพารามิเตอร์ในการปฏิบัติงานของเครื่องขุดอุโมงค์ขนาดเล็กสามารถปรับเปลี่ยนได้ทันที เพื่อจัดการแนวโน้มที่กำลังเกิดขึ้นก่อนที่จะเกิดความเสียหายต่อผิวหน้าพื้นดิน
เครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) เหมาะสำหรับดินและหินทุกชนิดหรือไม่?
การออกแบบเครื่องขุดอุโมงค์แบบไมโครสมัยใหม่มีให้เลือกใช้งานได้สำหรับสภาพดินที่หลากหลาย ตั้งแต่ดินเหนียวอ่อนมากและทรายที่มีน้ำขัง ไปจนถึงหินแข็งที่มีความแข็งแรงในการรับแรงอัดแบบไม่มีการกักเก็บสูง การเลือกประเภทเครื่องจักรที่เหมาะสม รูปแบบของหัวเจาะ และวิธีการปรับปรุงคุณสมบัติดินนั้น ขึ้นอยู่กับการสำรวจพื้นที่อย่างละเอียดและการประเมินด้านวิศวกรรมธรณีเทคนิคเป็นหลัก ในสภาพดินที่ท้าทายเป็นพิเศษ เช่น ดินผสมหลายชั้น (mixed-face) หรือดินที่มีความกัดกร่อนสูง จะมีการใช้หัวเจาะเฉพาะทางและระบบตรวจสอบการสึกหรอที่มีประสิทธิภาพสูงขึ้น เพื่อให้มั่นใจว่าการขุดจะดำเนินไปอย่างต่อเนื่องโดยไม่มีการหยุดชะงักตลอดระยะการขุด
สารบัญ
- หลักวิศวกรรมพื้นฐานที่อยู่เบื้องหลังการปฏิบัติงานแบบไม่ขุดร่อง
- การผสานระบบการดันท่อและการเชื่อมต่อเชิงโครงสร้าง
- พื้นที่ใช้สอยบนผิวดินน้อยที่สุด
- ความสามารถในการปรับตัวตามสภาพพื้นผิวและการป้องกันการรบกวน
- การเปรียบเทียบกับวิธีการติดตั้งทางเลือกอื่น
-
คำถามที่พบบ่อย
- เครื่องขุดอุโมงค์แบบไมโครต้องอยู่ลึกลงไปเท่าใดจึงจะหลีกเลี่ยงการรบกวนผิวดิน?
- เครื่องขุดอุโมงค์แบบไมโครสามารถทำงานโดยตรงใต้อาคารหรือรากฐานที่มีอยู่แล้วได้หรือไม่?
- การตรวจสอบใดบ้างที่ใช้ยืนยันว่าการขุดด้วยเครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) ไม่ก่อให้เกิดการเคลื่อนตัวของพื้นผิวดิน
- เครื่องขุดอุโมงค์ขนาดเล็ก (micro tunnel boring machine) เหมาะสำหรับดินและหินทุกชนิดหรือไม่?